
 机械手夹子solidworks14版本模型源文件
机械手夹子solidworks14版本模型源文件
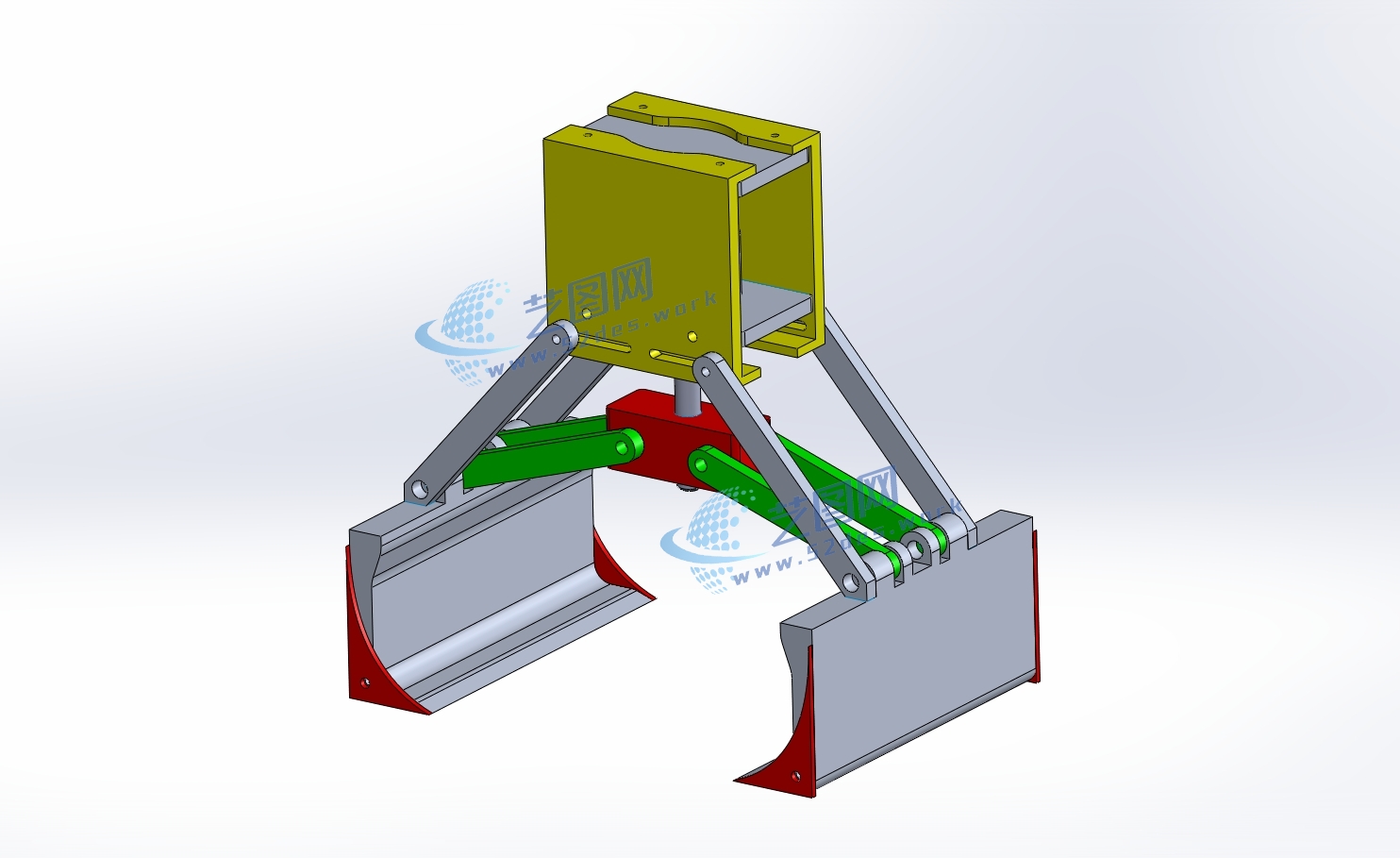 机械手夹子solidworks14版本三维装配模型
机械手夹子solidworks14版本三维装配模型 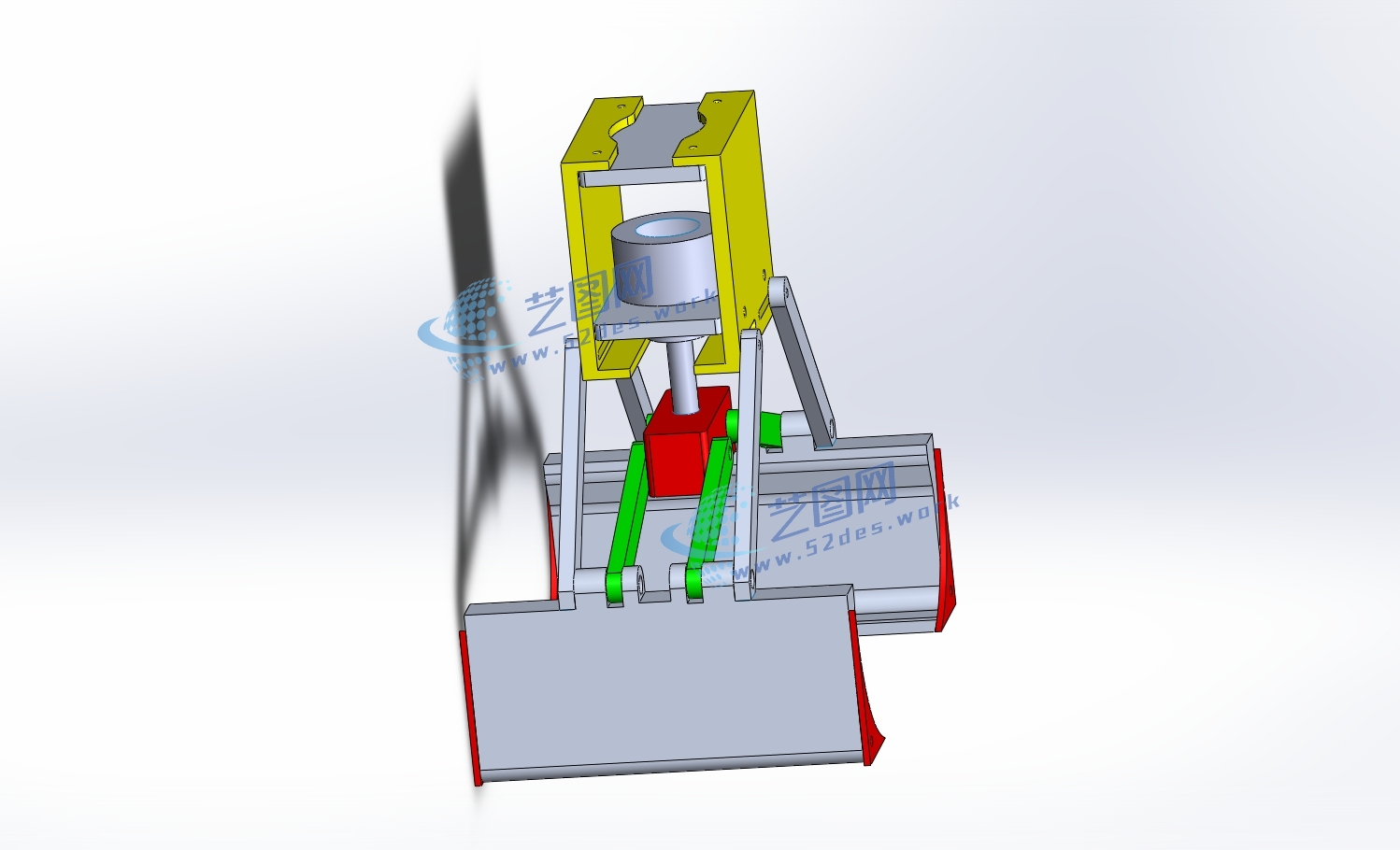 机械手夹子solidworks14版本三维装配模型
机械手夹子solidworks14版本三维装配模型 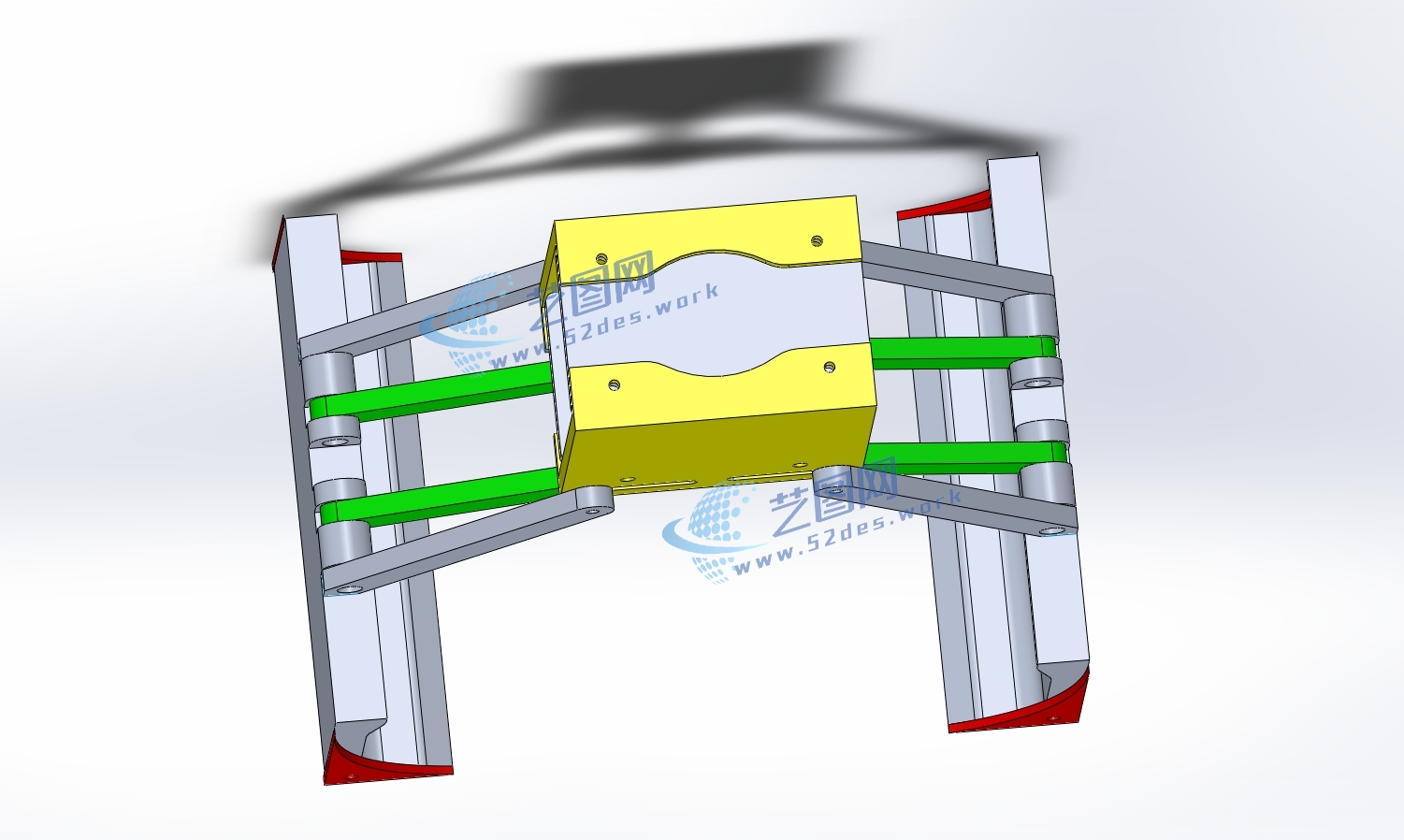 机械手夹子solidworks14版本三维装配模型
机械手夹子solidworks14版本三维装配模型 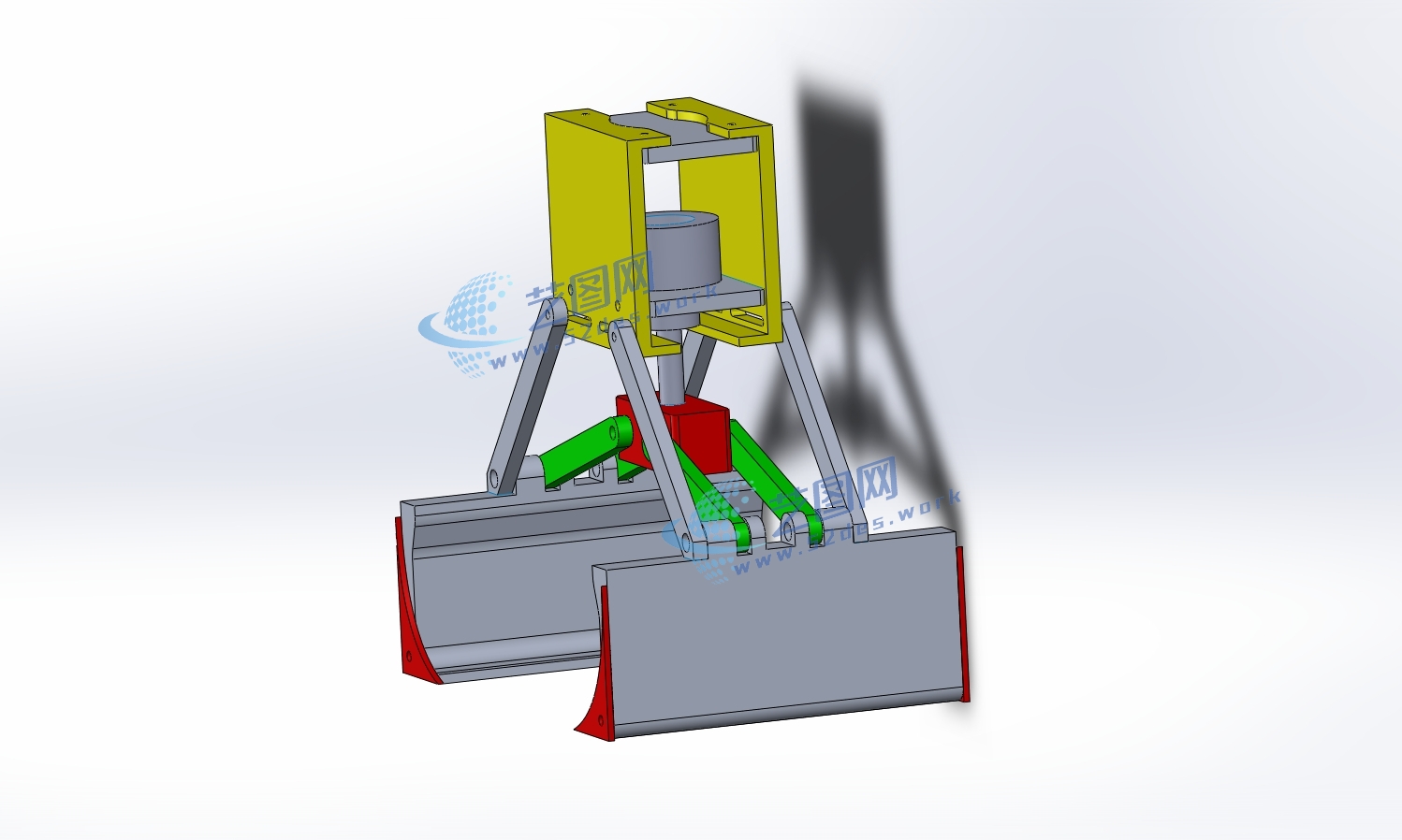 机械手夹子solidworks14版本三维装配模型
机械手夹子solidworks14版本三维装配模型 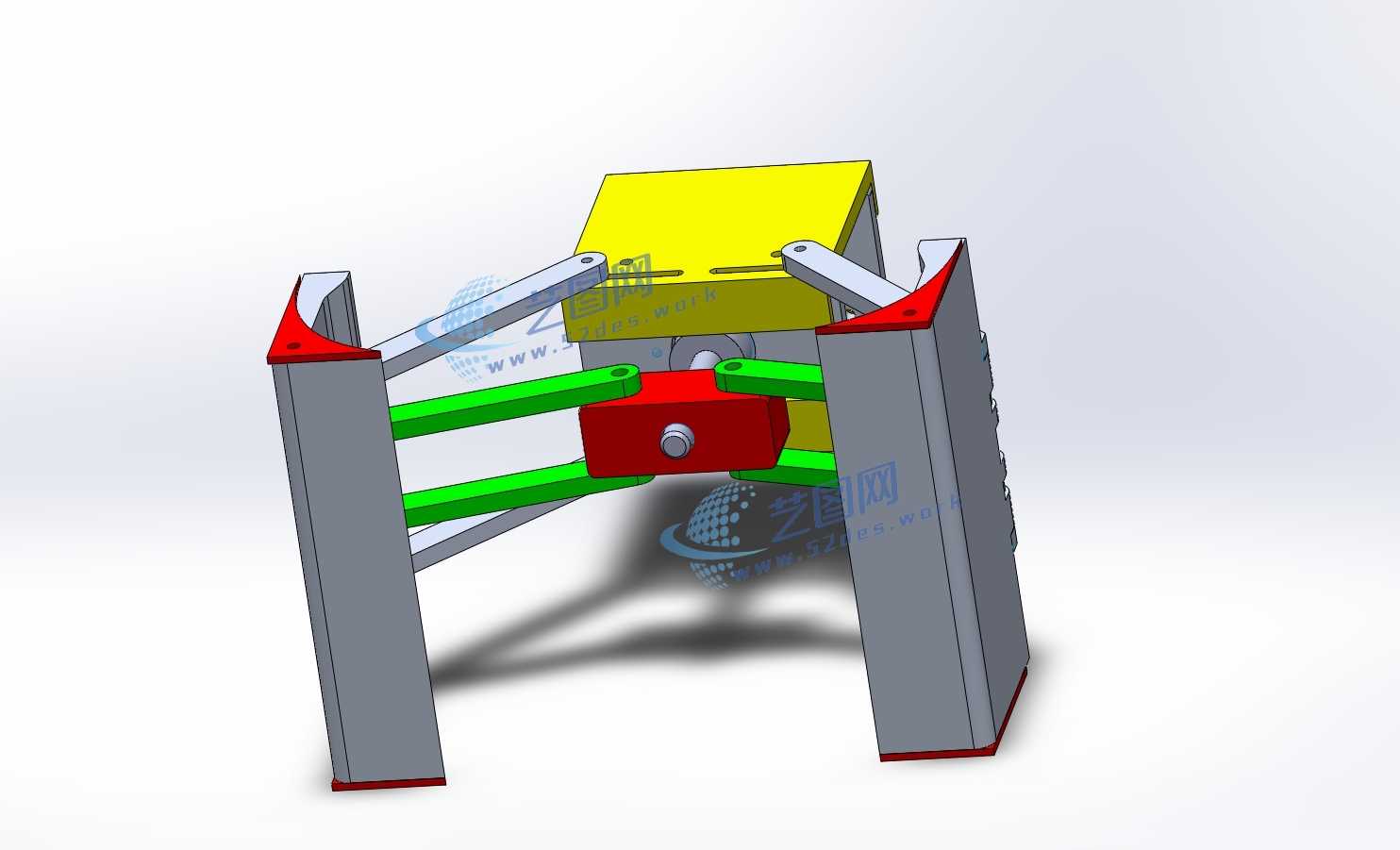
机械手夹子的三维设计追求高精度和多功能性。夹头选用耐磨、高强度的材料,确保牢固抓取各种形状的物体。夹持力通过精密的机械结构和电控系统调控,以满足不同应用场景的需求。夹具设计灵活,可适应各种工件的尺寸和形状。整体结构紧凑,考虑到负载能力和速度,保证机械手夹子的高效运行。三维设计中注重细节,如夹爪的力反馈和夹持力调整,使其成为工业自动化领域理想的抓取工具。

