
文件内容:solidworks21三维模型、CAD图纸、设计说明书 
蘑菇采摘机器人solidworks21版本模型源文件,可编辑,含参数
蘑菇采摘机器人solidworks21版本、三维模型零件预览图
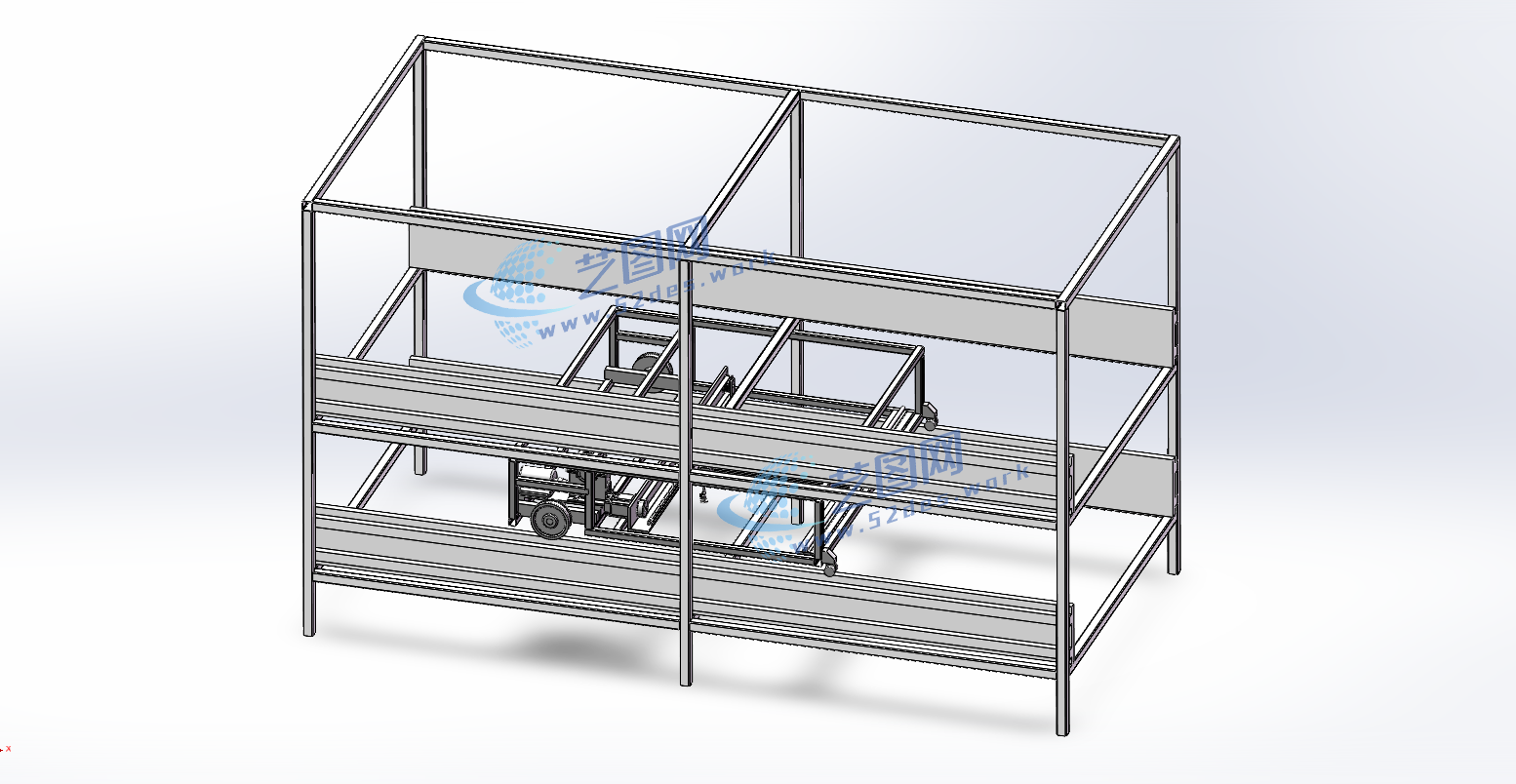
蘑菇采摘机器人solidworks21版本三维装配模型
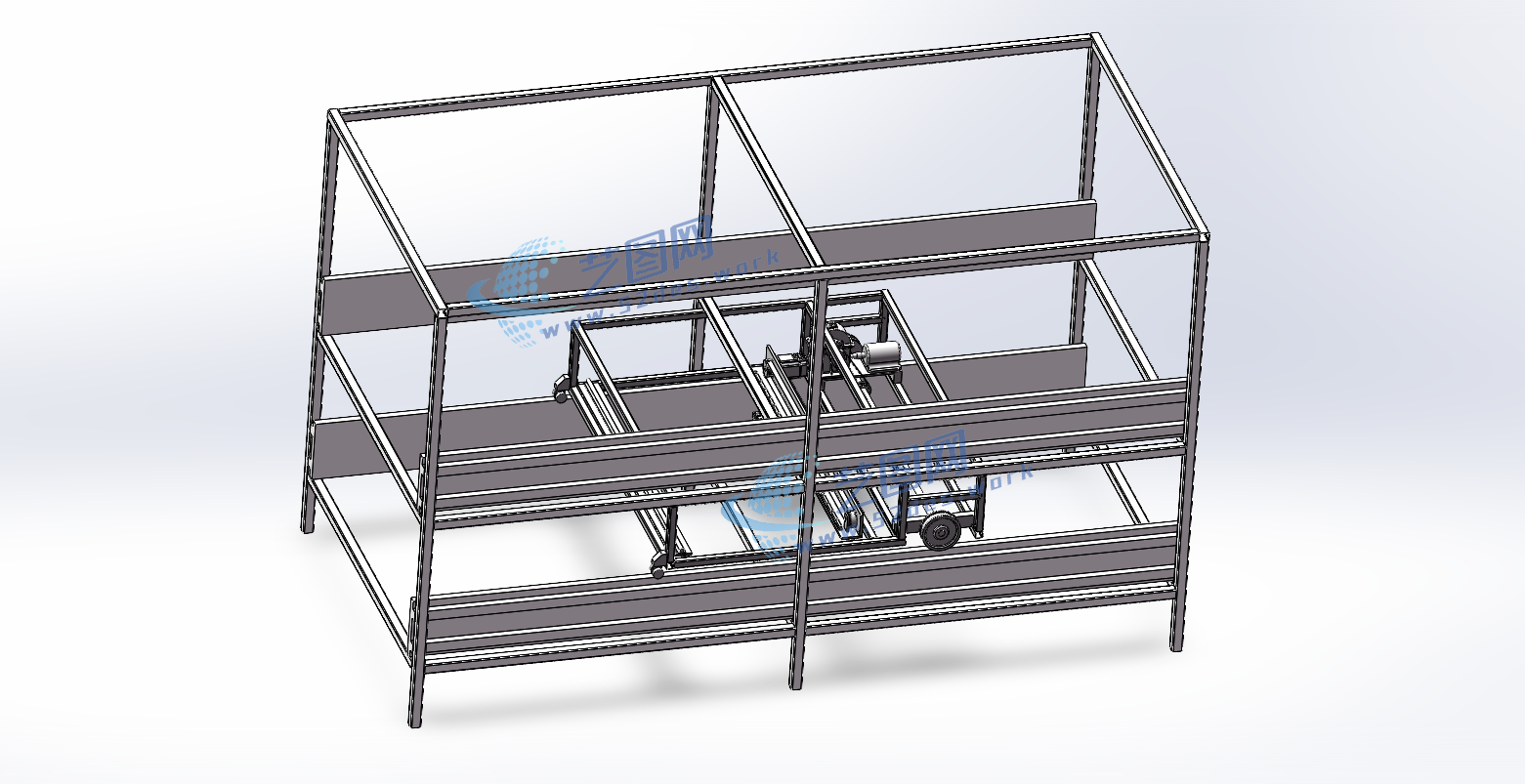
蘑菇采摘机器人solidworks21版本三维装配模型
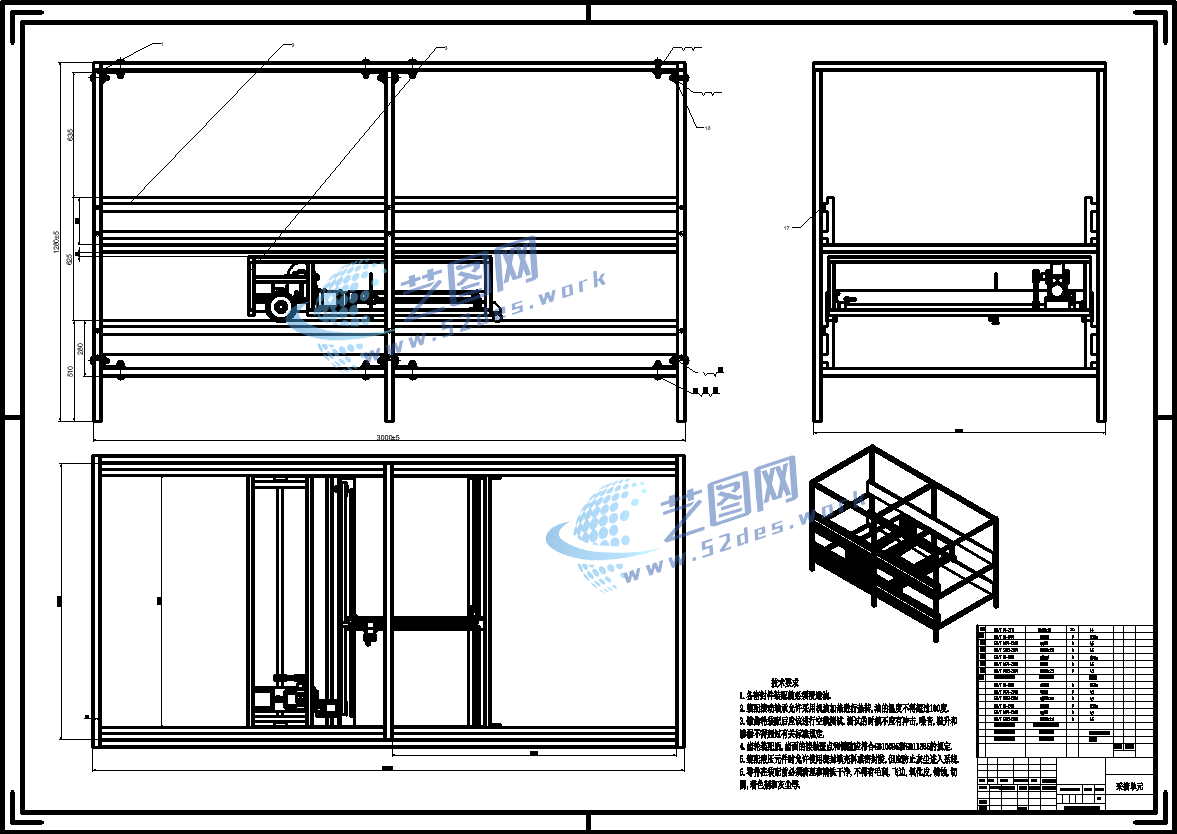
机械CAD装配图,蘑菇采摘机器人能够实现对蘑菇自动化设备的发展,提高生产作业效率。
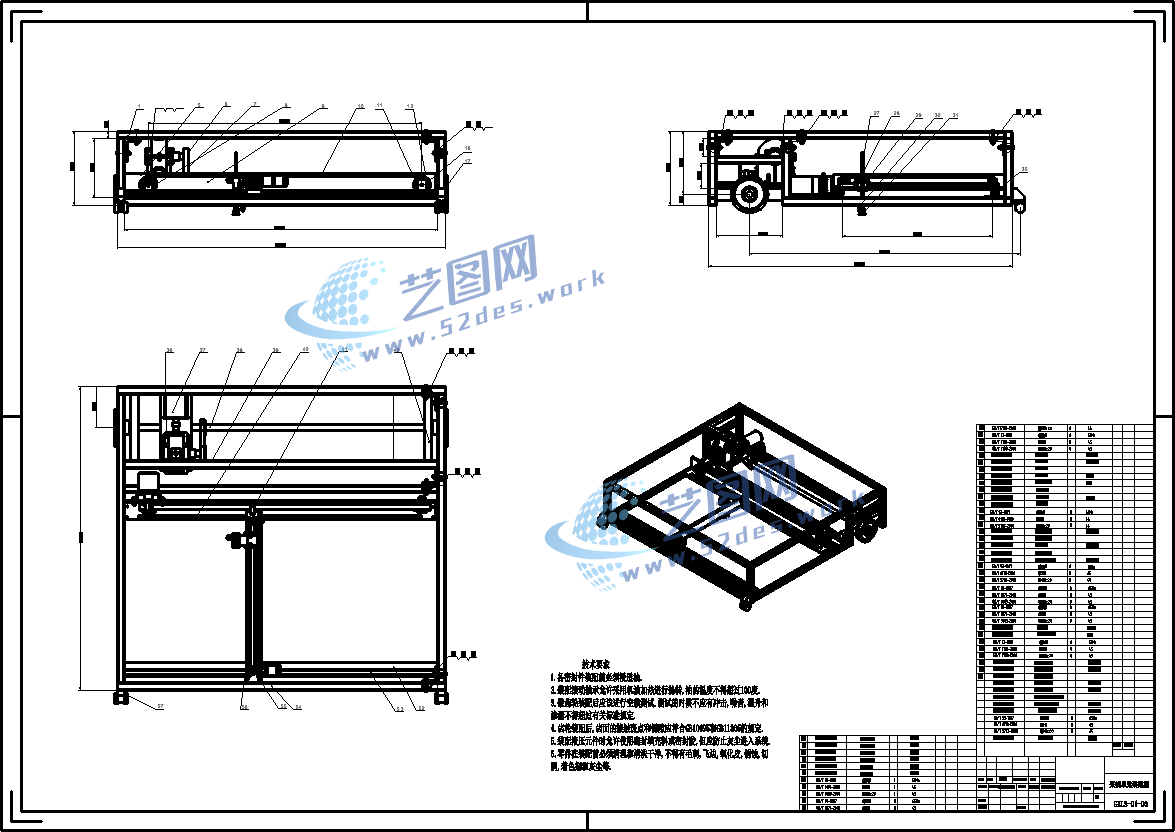
移动底盘小车结构CAD装配图
一级蜗轮蜗杆减速器CAD图纸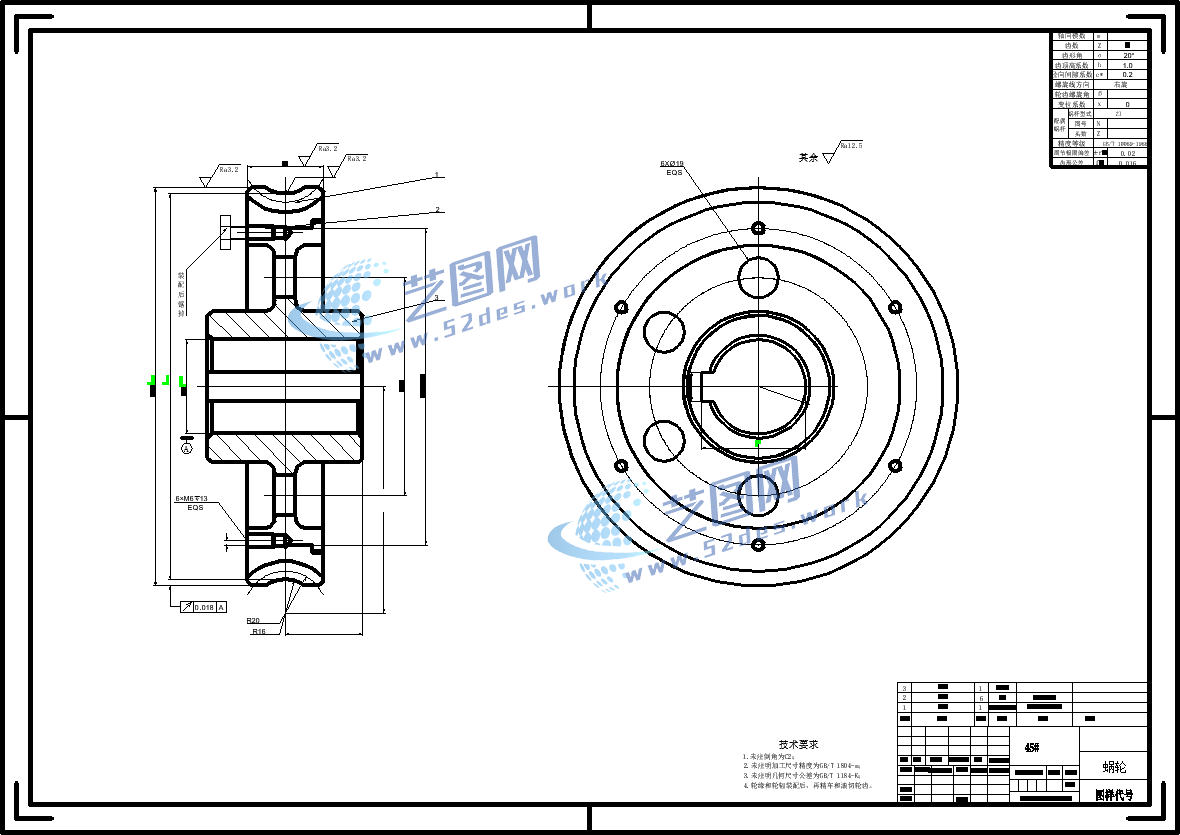
蜗轮CAD零件图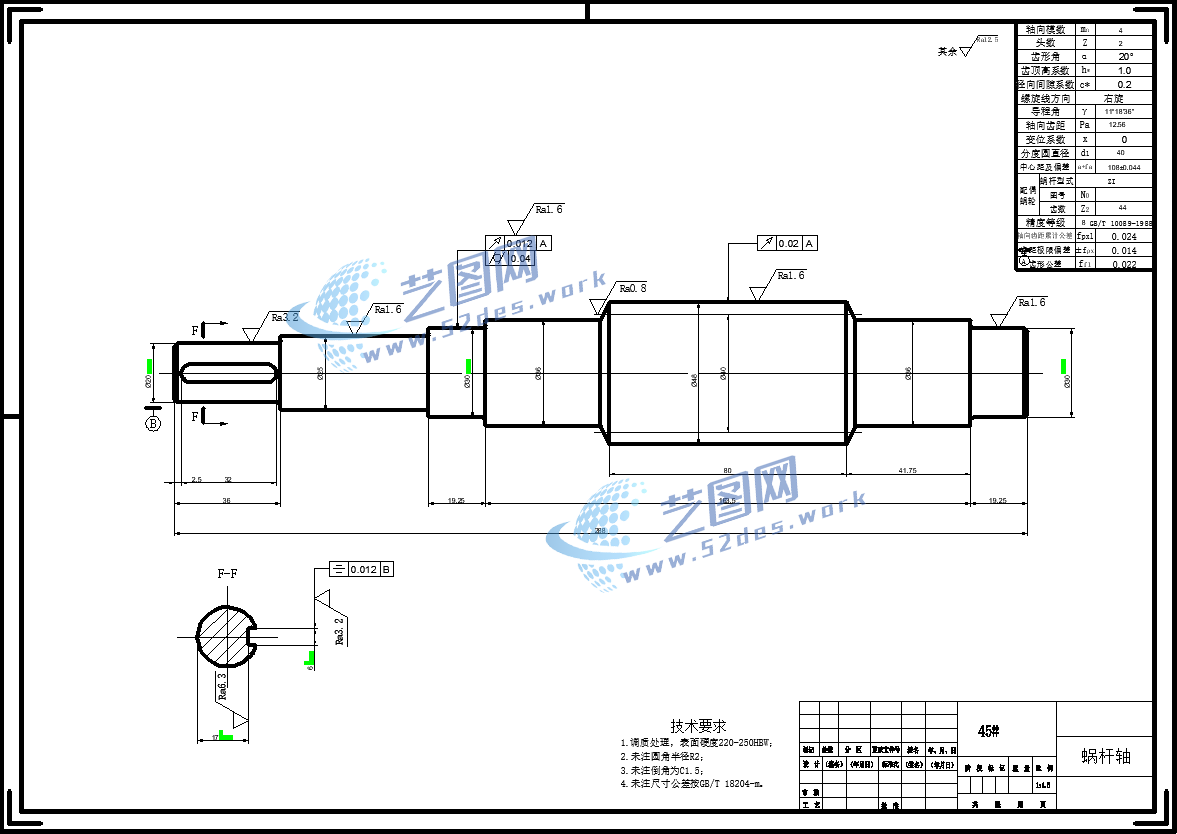
蜗杆轴CAD零件图
蘑菇采摘机器人设计说明书目录
食用菌已具备了特定的营养健康价值,市场上对食用菌的需求量也日渐增大。在食用菌的制作流程中,能够灵活便利的采摘食用菌就变得非常重要。随着国际市场上对食用菌采摘的需求量愈来愈大,为减少人工成本,提升采摘效果,拥有一个能够自动采摘食用菌的机器人就显得尤为重要。本文对床栽食用菌采摘机器人的移动平台、各轴采摘臂及柔性末端执行器进行了设计,并对其机械结构以及主要轴的受力情况进行了具体分析,论文的主要研究内容如下:
(1)对采摘机器人的总体方案进行设计。主要包括移动平台框架及其驱动机构,各轴采摘臂,柔性末端执行器这四部分。通过移动平台的驱动机构来实现采摘机器人的驱动,通过各轴采摘臂的移动来进行蘑菇的定位,再通过柔性末端执行器实现采摘。
(2)对采摘机器人移动平台的机械结构进行设计。主要包括同步带的设计计算,主要轴的设计计算,及减速器的设计计算。
(3)对各轴采摘臂的机械结构进行设计。主要包括电机选型,同步带的设计计算,主要轴的设计计算以及其他主要零件的设计计算。
本文设计了一种配合培养架来进行床栽食用菌采摘的机器人,能够实现在培养架上进行一定效率的采摘,对提高工厂化培养蘑菇的采摘效率具有一定现实意义。
