
文件内容:solidworks20三维模型、CAD图纸、设计说明书、仿真视频
码垛搬运机器人solidworks21版本模型源文件,可编辑,含参数
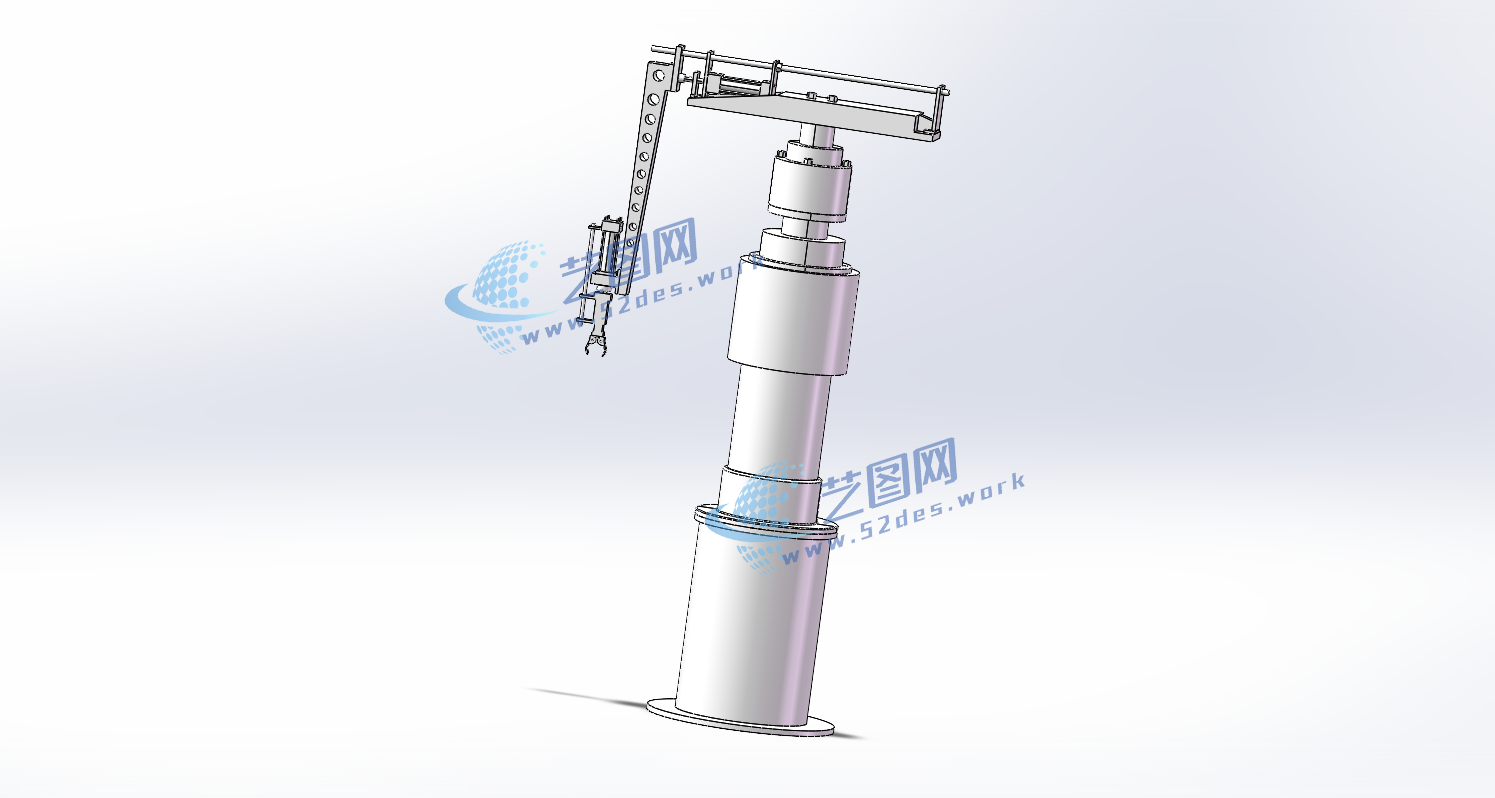
码垛搬运机器人solidworks21版本三维装配模型
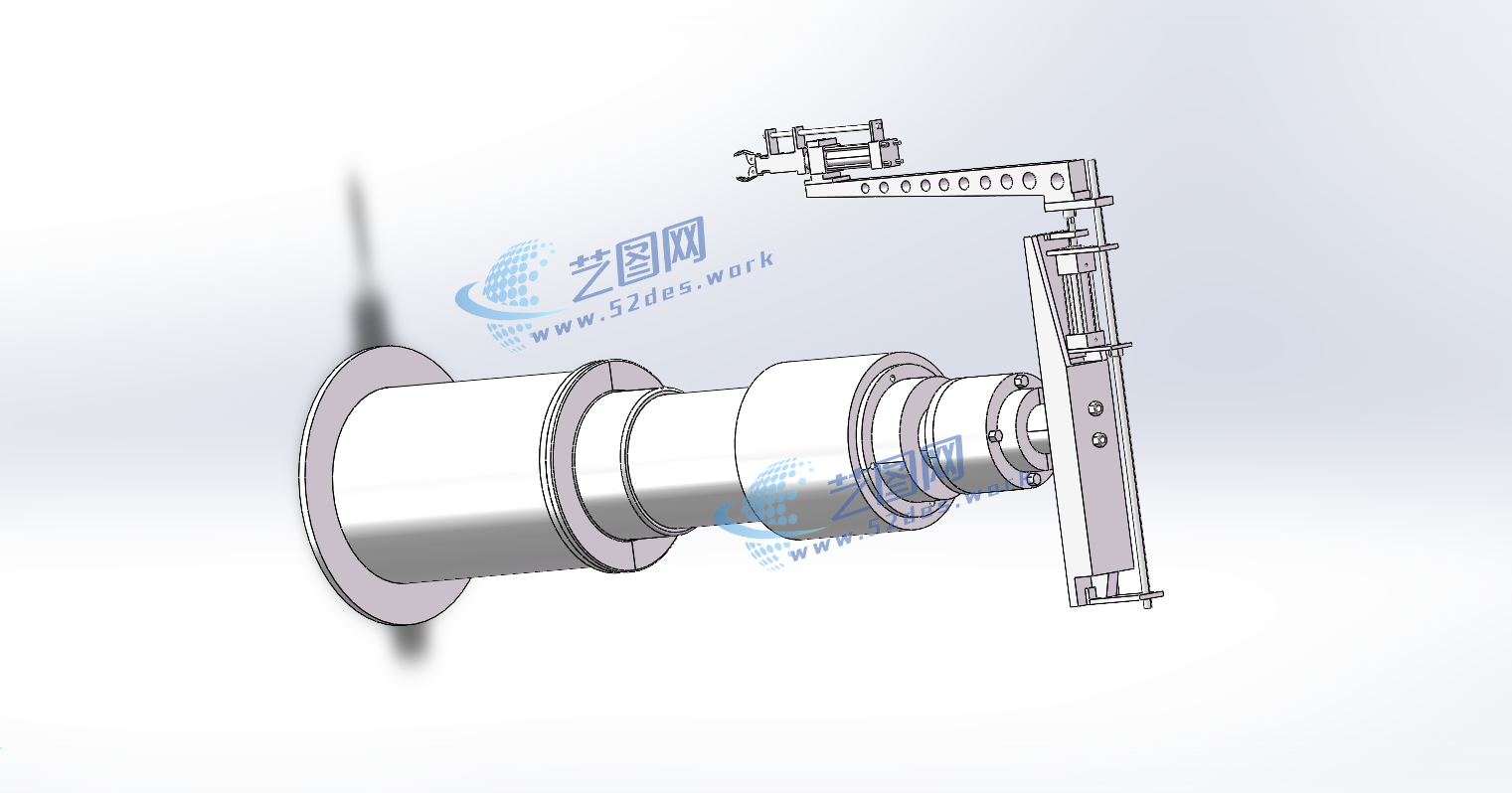
码垛搬运机器人solidworks21版本三维装配模型
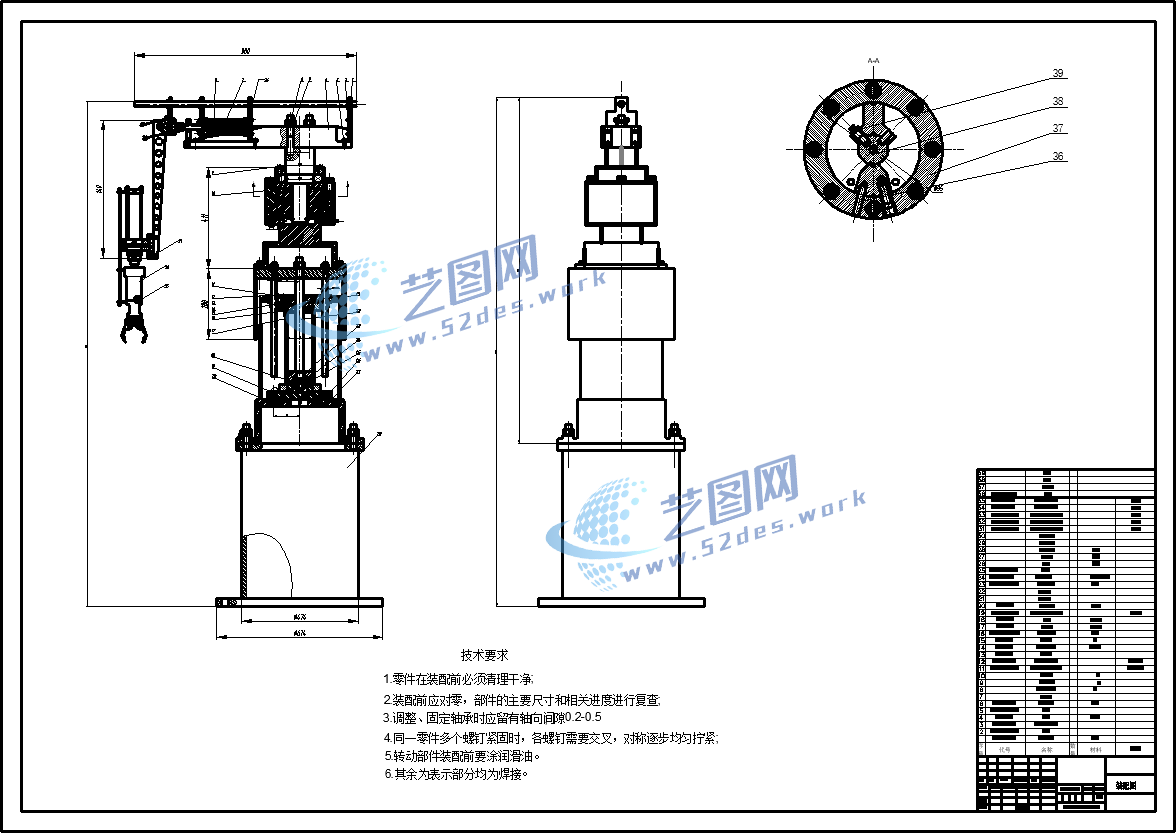
机械CAD装配图,所设计的玛朵机械手能够实现回转、迁移、上下等方向运动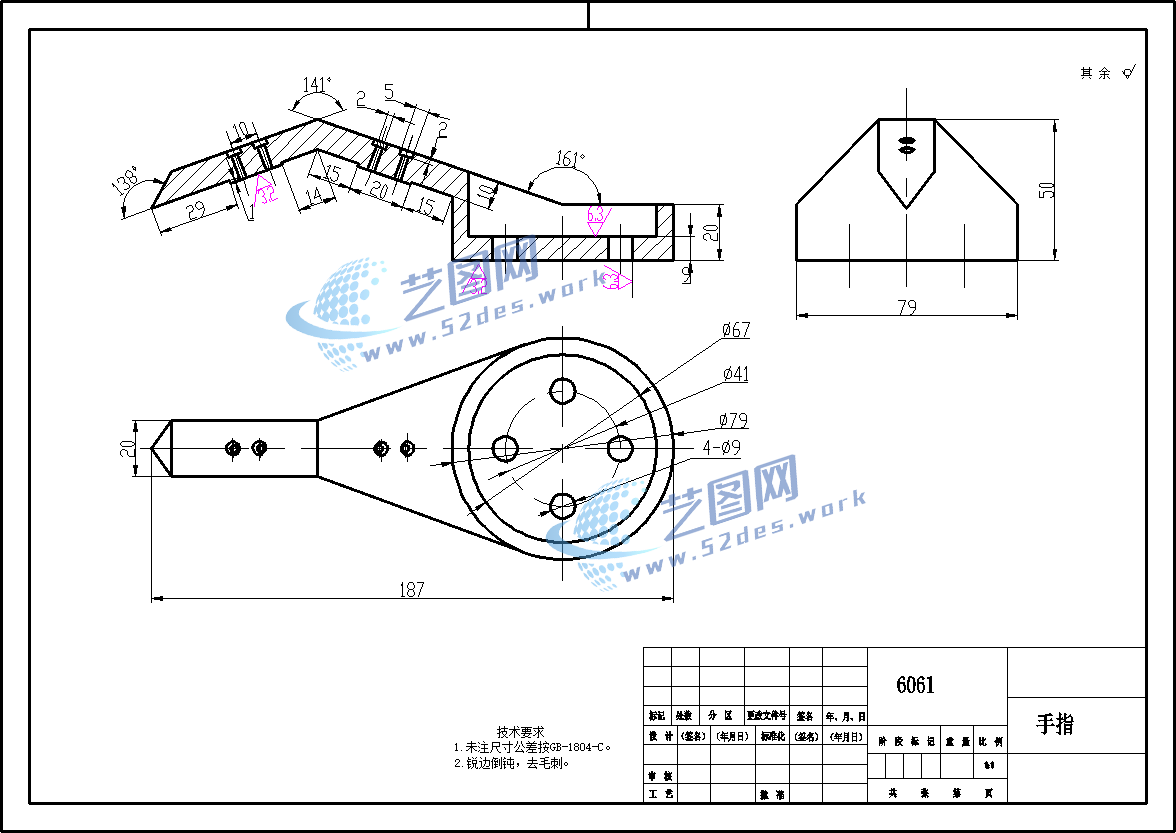
新国标CAD图纸:零件图
 新国标CAD图纸:零件图
新国标CAD图纸:零件图 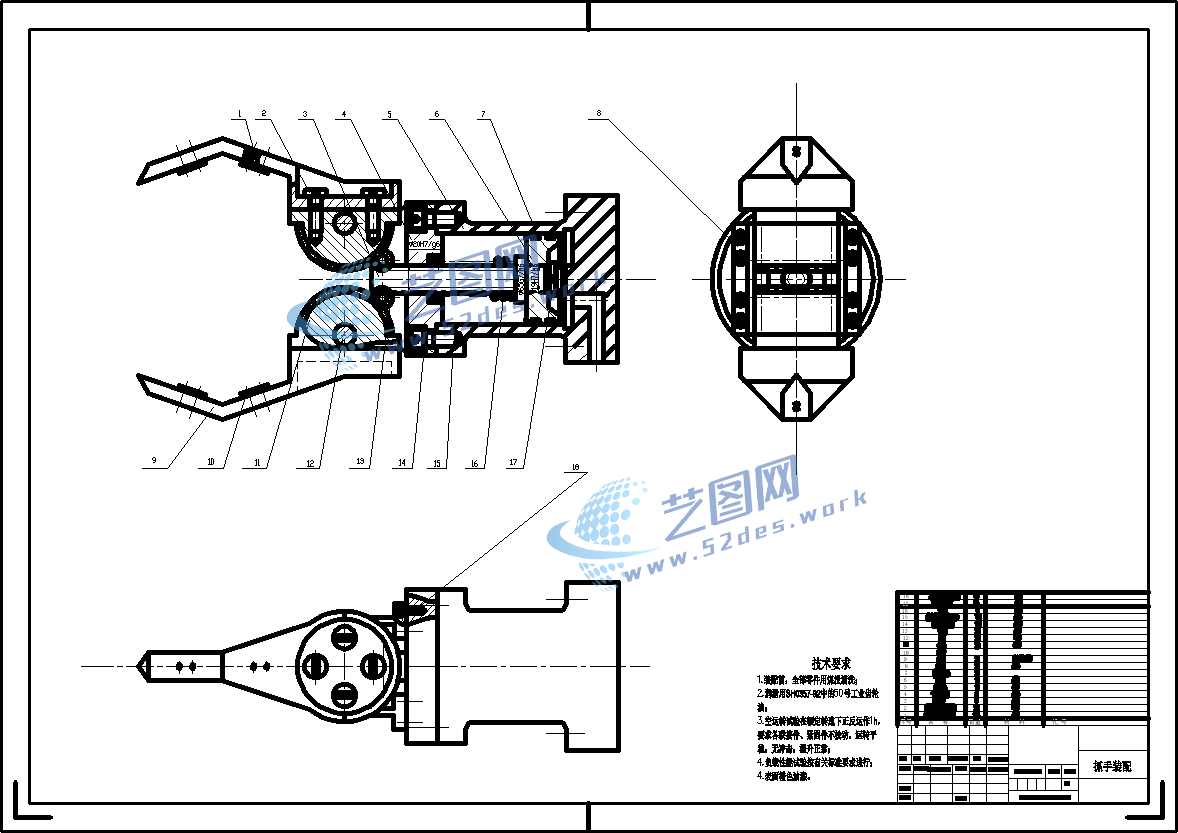
CAD机械手夹爪装配图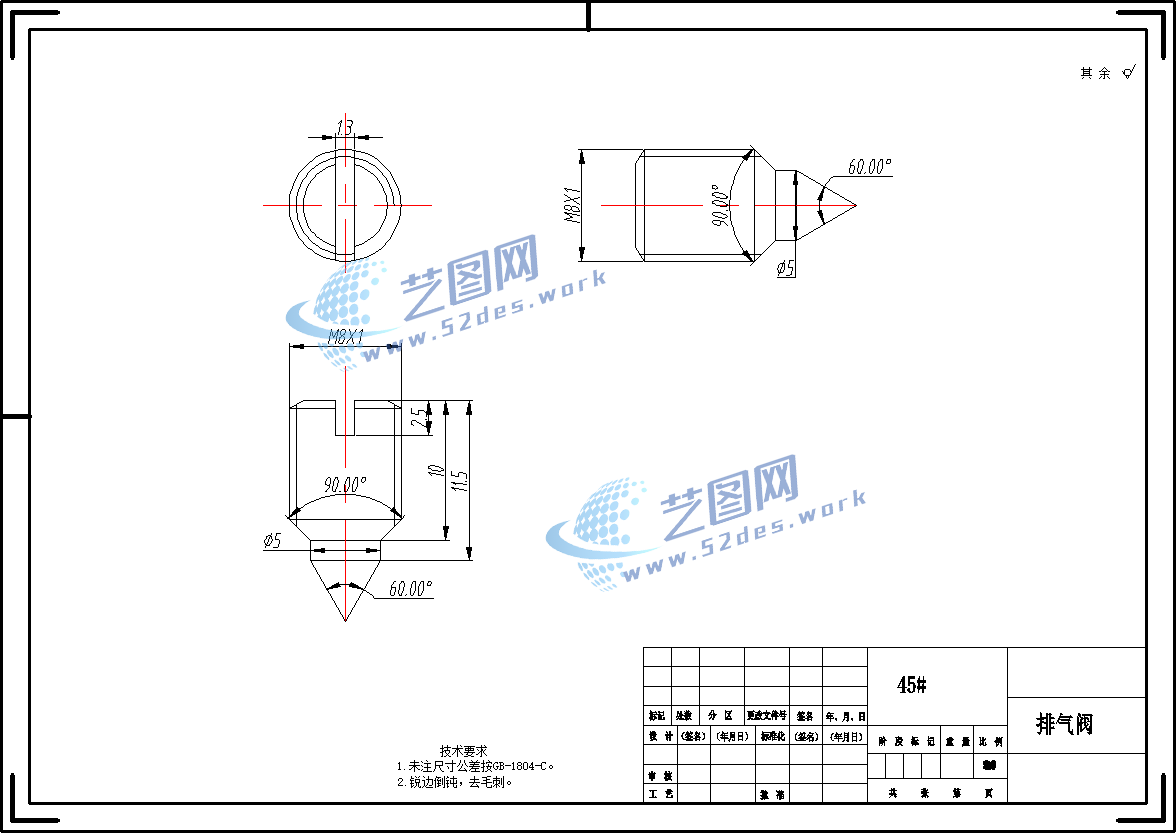
新国标CAD图纸:零件图
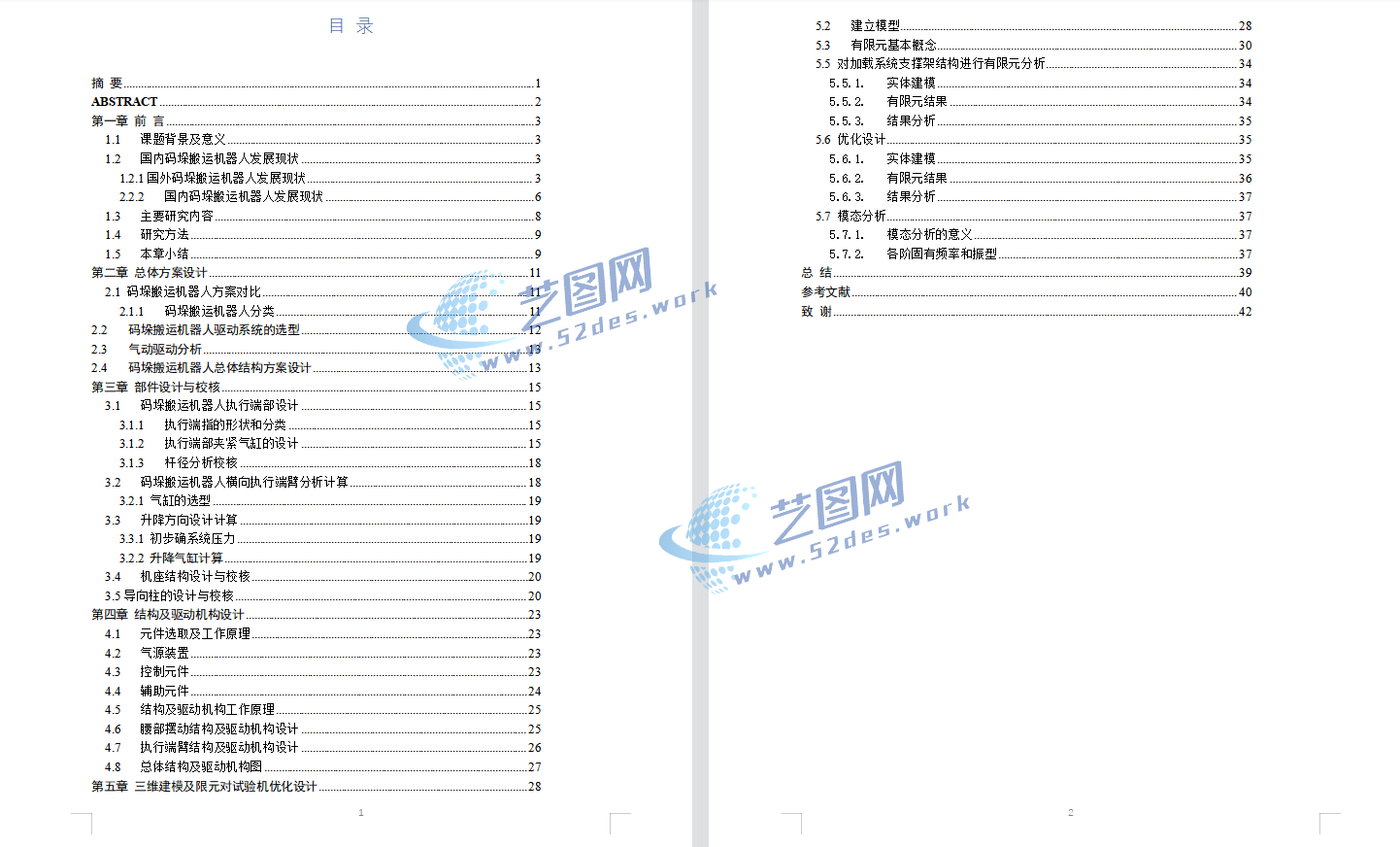
码垛搬运机器人设计说明书目录
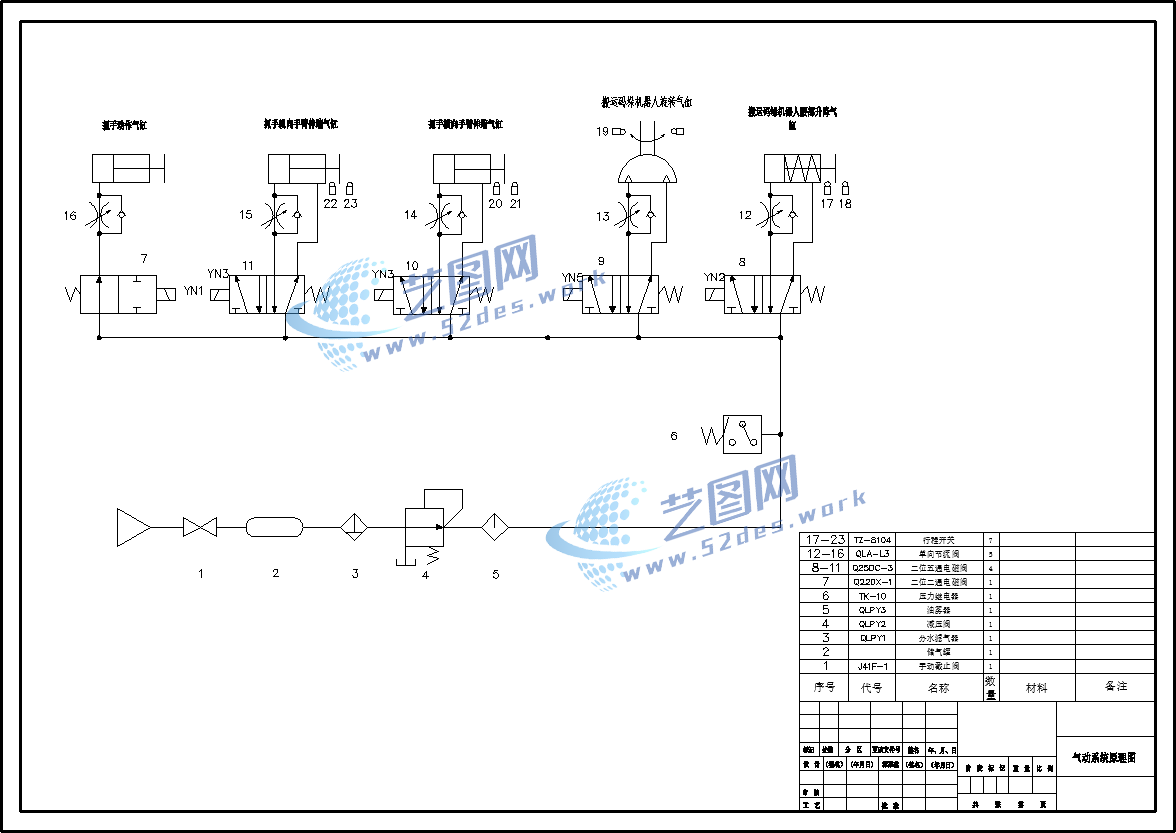
随着我国工业化的发展,制造业对码垛搬运机器人愈加关注。码垛搬运机器人结构设计中最为重要的就是其码垛搬运机器人机构单元。本次课题设计的题目为码垛搬运机器人结构设计与优化。码垛搬运机器人采用传动结构及驱动机构进行驱动。为此本课题研究码垛搬运机器人的结构及驱动机构设计。对本次课题研究的码垛搬运机器人设计及驱动机构设计进行原部件的选取计算分析。通过文献搜集及资料整理,设计出了本套码垛搬运机器人。本次课题设计的码垛搬运机器人在可靠性及成本方面较好。适用于我国设备所需要的工况环境以及市场需求。对机械执行端的应用以及码垛搬运机器人的应用也在逐年的提升。通过对码垛搬运机器人结构的分析与设计,进行了零部件的选取与应用,并设计了相关零部件。通过数模进行CAD绘制。
通过本次课题对码垛搬运机器人的结构和驱动形式进行设计,其零部件的选取以及应用为我国码垛搬运机器人系统设计提供可靠的技术依据以及技术支撑。
声明:本站所有文章,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。
