
 文件内容:solidworks三维模型、CAD图纸、设计说明书
文件内容:solidworks三维模型、CAD图纸、设计说明书 
抢险挖掘机器人solidworks通用版本模型源文件
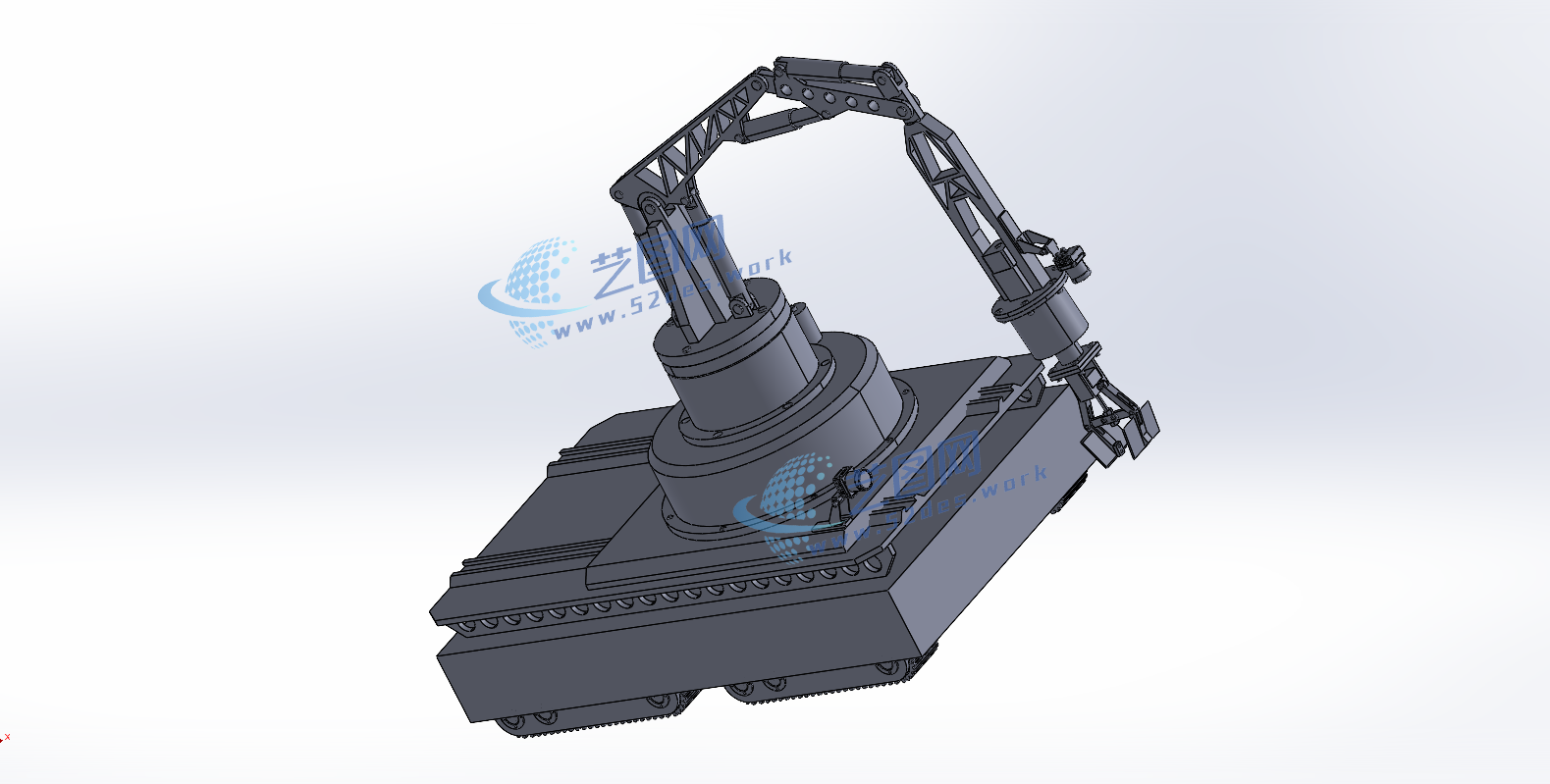
抢险挖掘机器人solidworks通用版本三维装配模型
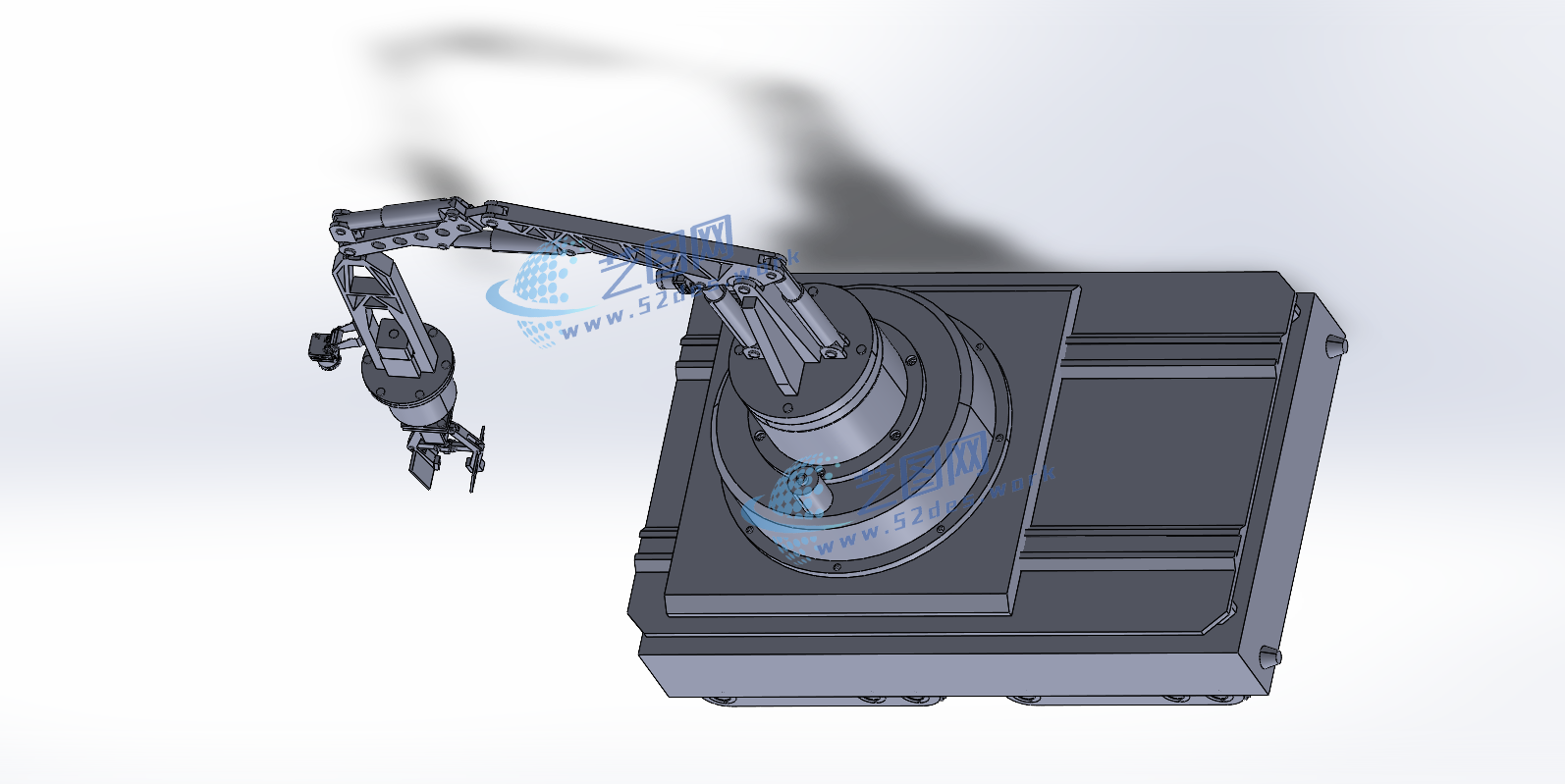
抢险挖掘机器人solidworks通用版本三维装配模型
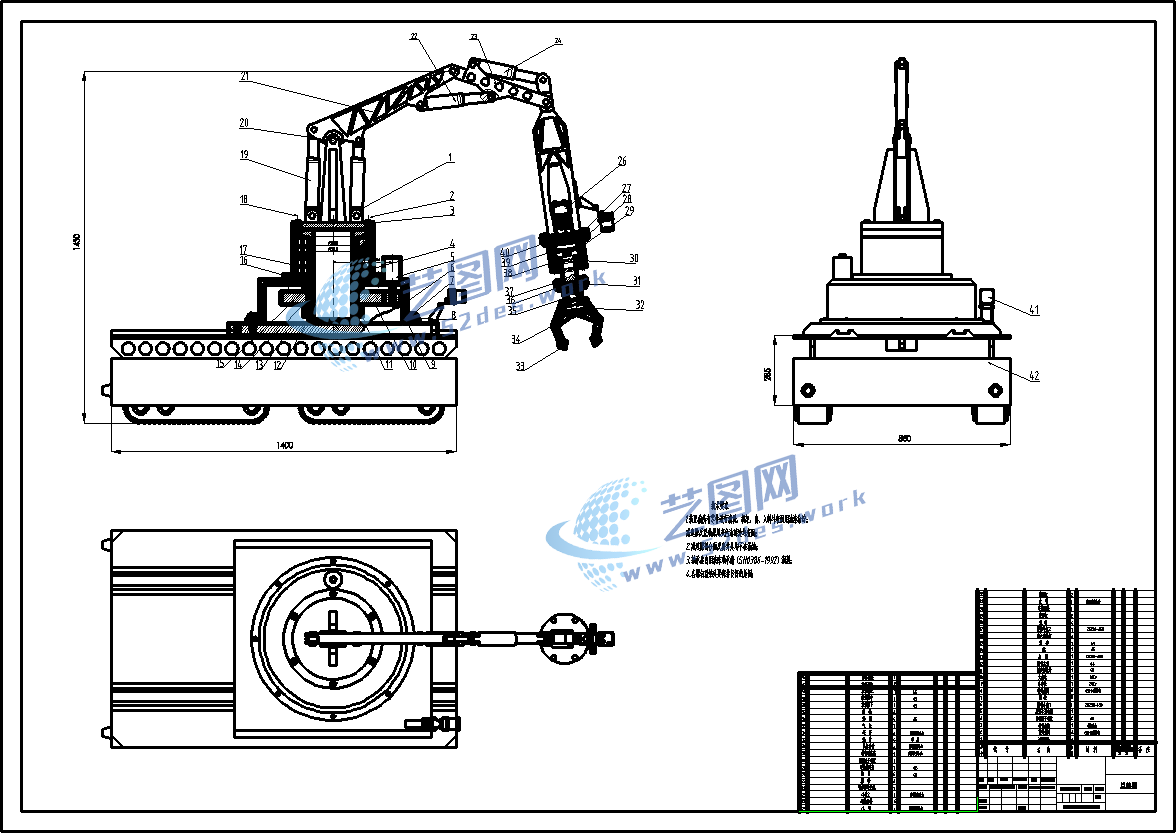
新国标CAD图纸:机械结构设计装配图
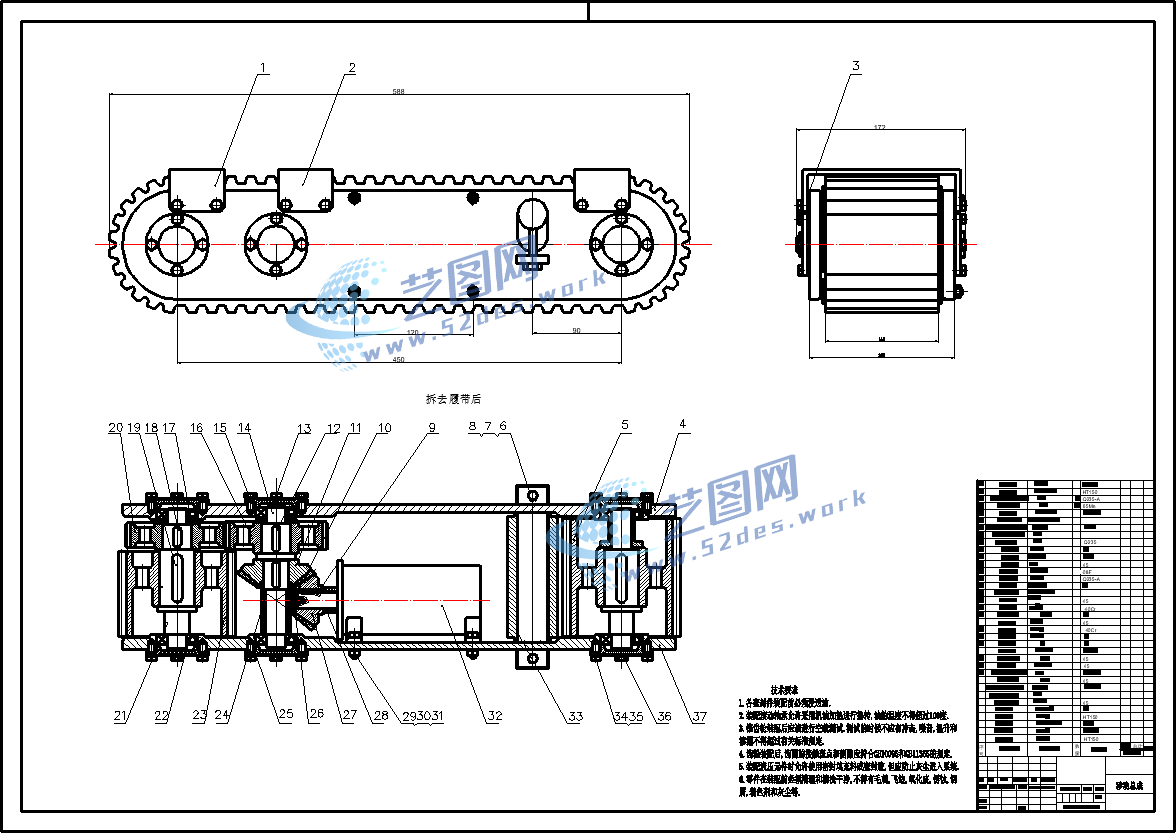
移动式底盘CAD文件
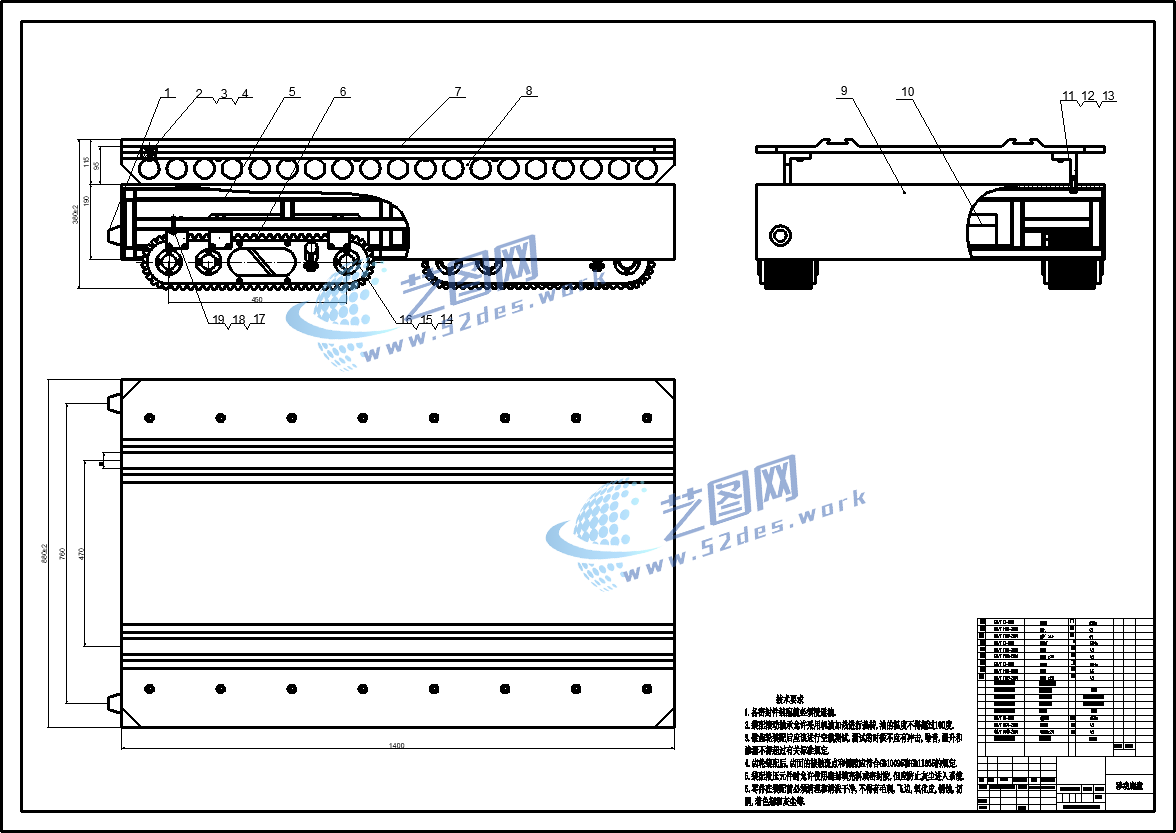
CAD移动底盘文件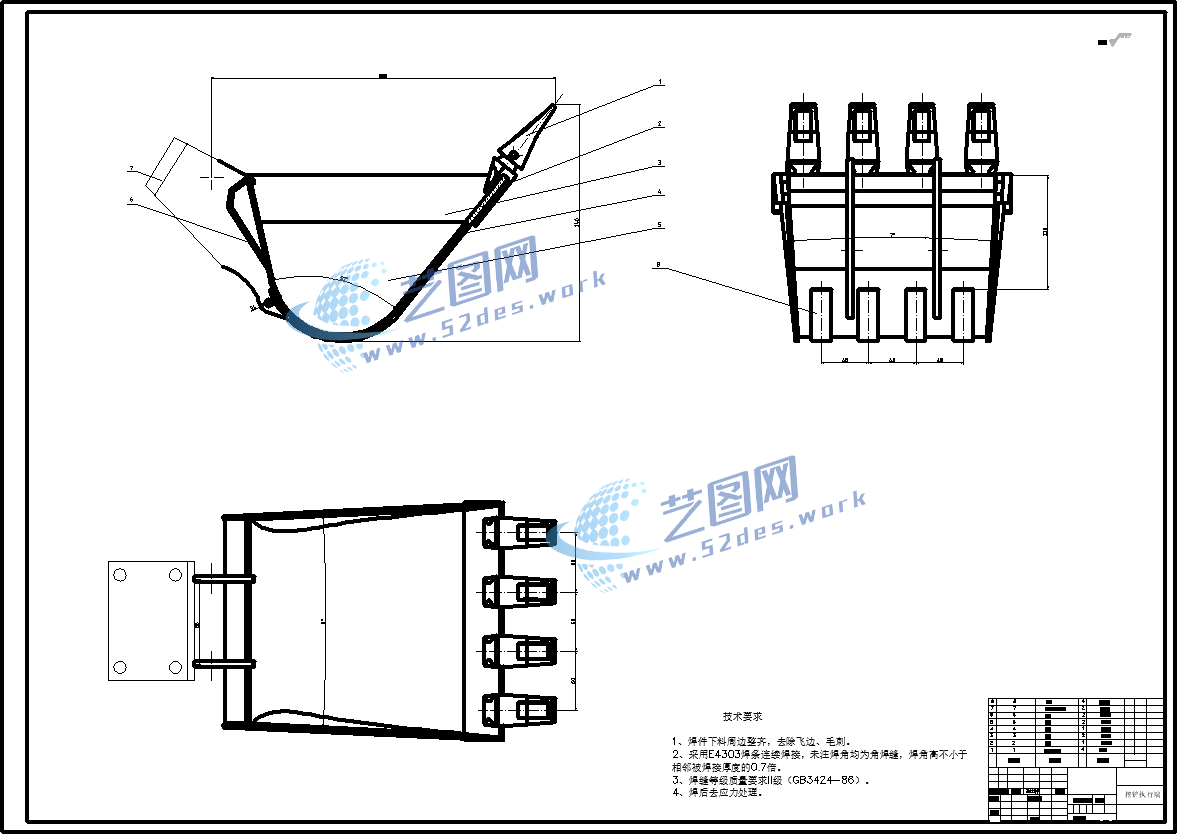
新国标CAD图纸:零件图
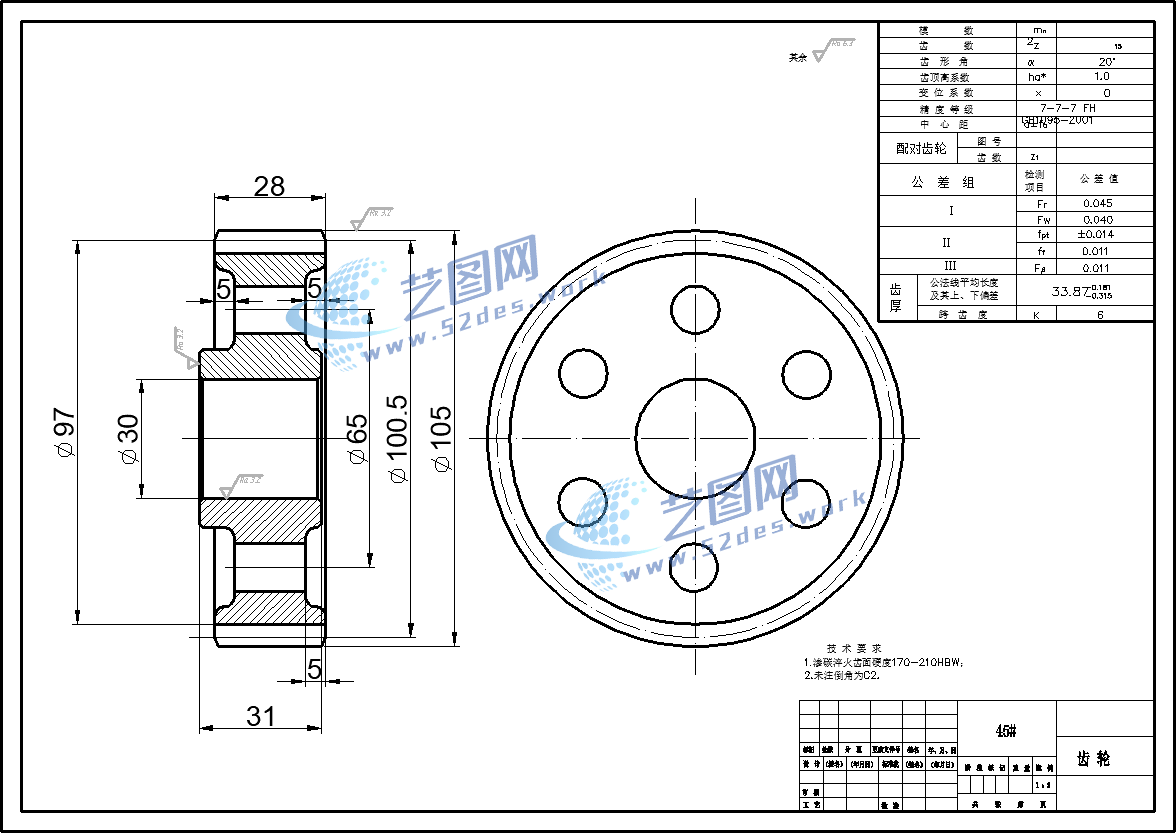
新国标CAD图纸:零件图
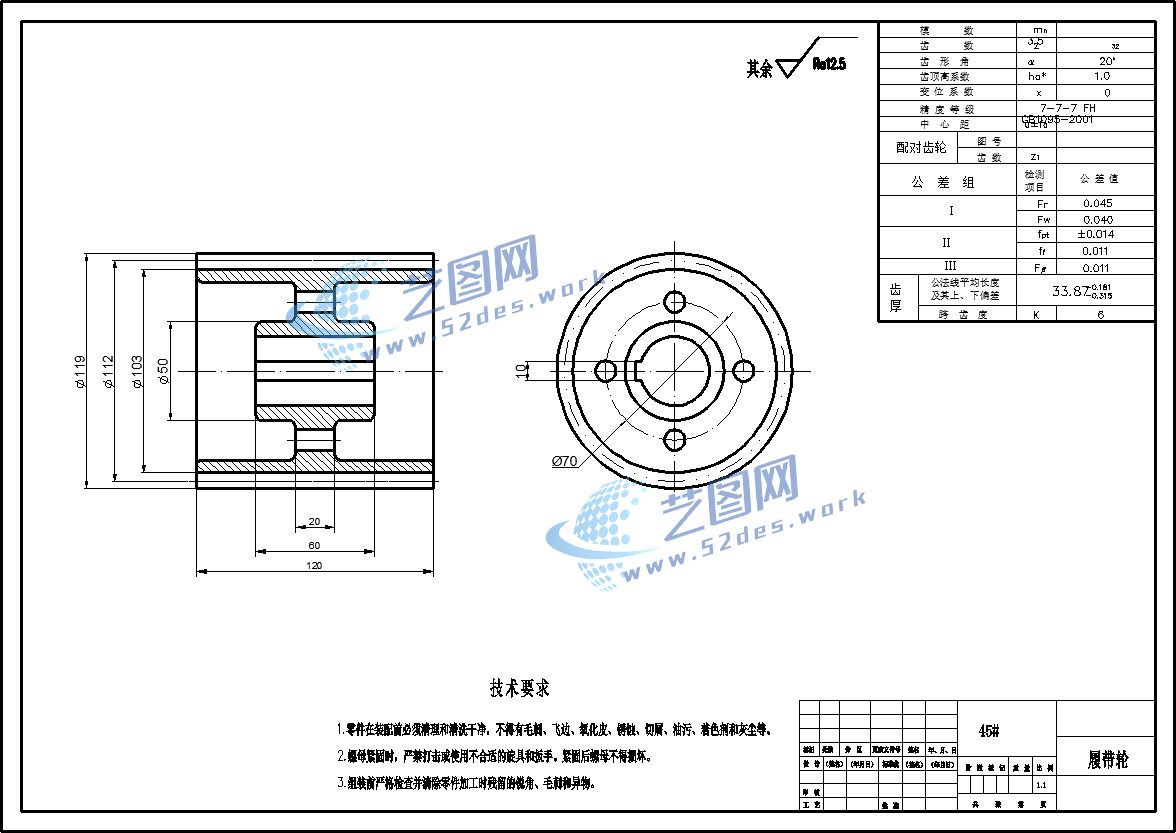
新国标CAD图纸:零件图
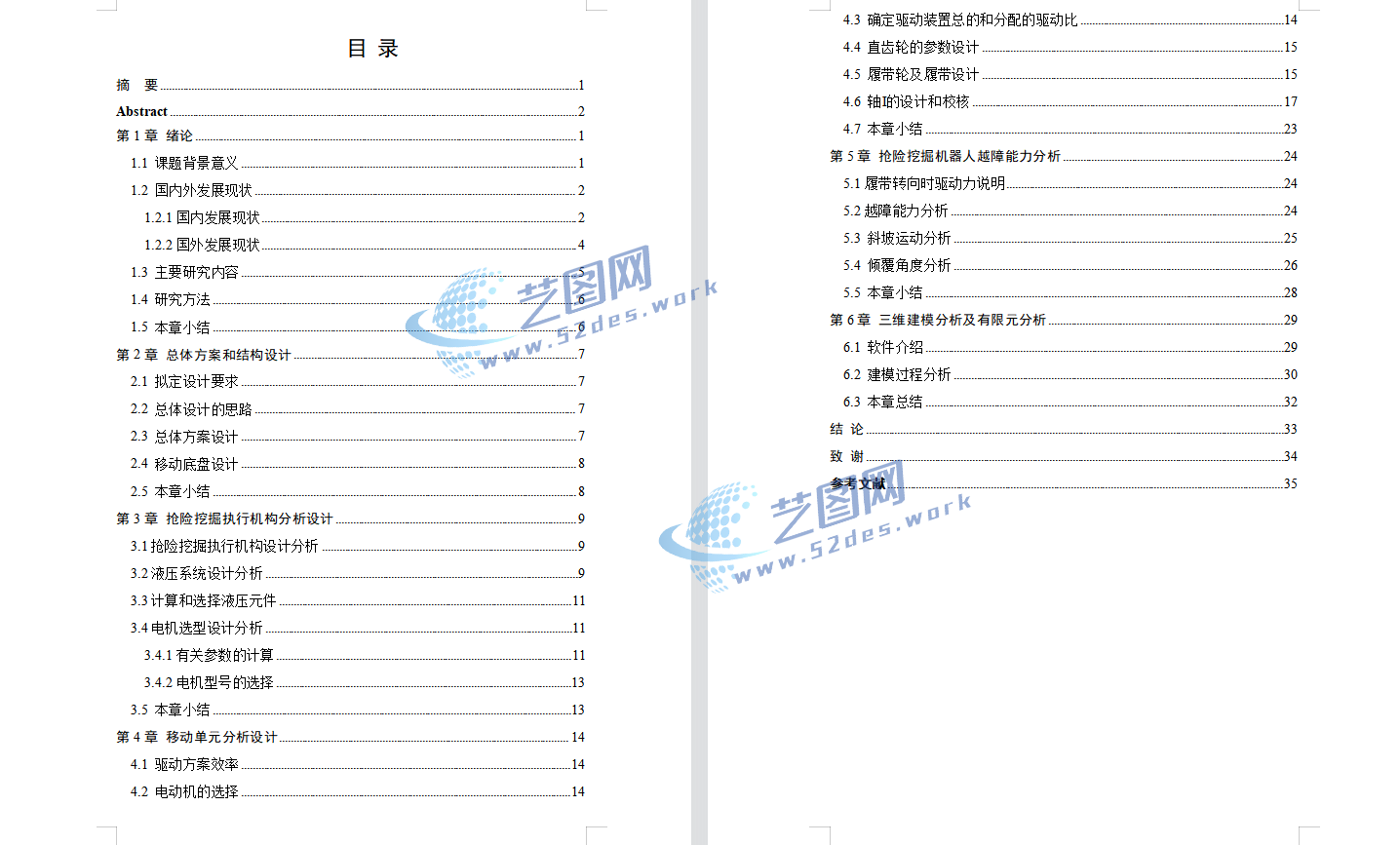
抢险挖掘机器人设计说明书目录
本次课题主要设计一款抢险挖掘机器人,用于执行一些复杂环境下的抢险挖掘任务。在高效完成任务的同时,起到对操作人员的保护作用。本次课题设计的抢险挖掘机器人,应满足对复杂地形的通过性及稳定性。并对抢险挖掘机构进行设计,满足抢险挖掘部分机械手具有多自由度可灵活拾取,拆卸的功能。该抢险挖掘机器人应具备视觉传感功能,通过无线传输功能实时对工作状态进行监控,完成对抢险挖掘执行端以及及移动底盘的分析设计。通过本次课题对抢险挖掘机器人的设计,需要完成对抢险挖掘机器人各部件的分析计算同时需要绘制三维模型及二维工程图。
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。
