
 文件内容:UG三维模型、CAD图纸、设计说明书
文件内容:UG三维模型、CAD图纸、设计说明书  六轴物流搬运机械手UG模型源文件
六轴物流搬运机械手UG模型源文件 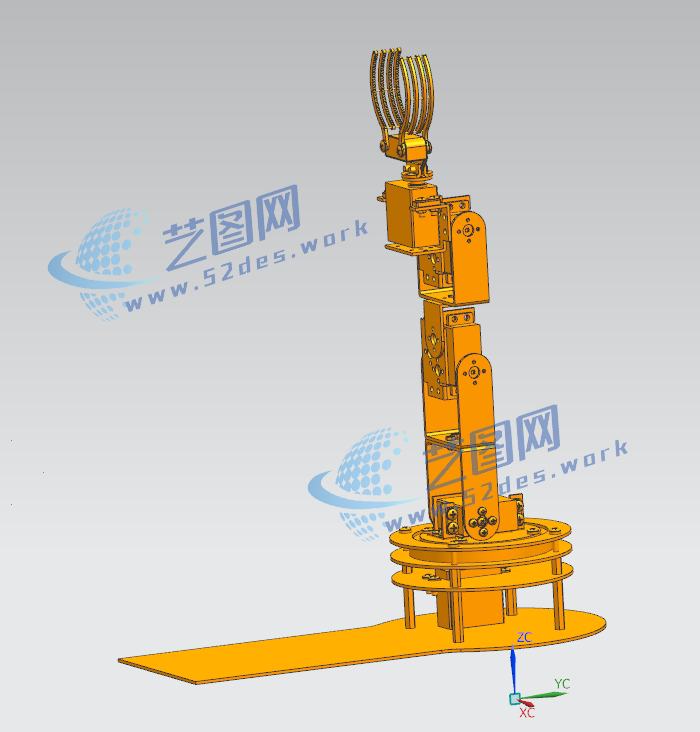 六轴物流搬运机械手UG三维装配模型
六轴物流搬运机械手UG三维装配模型 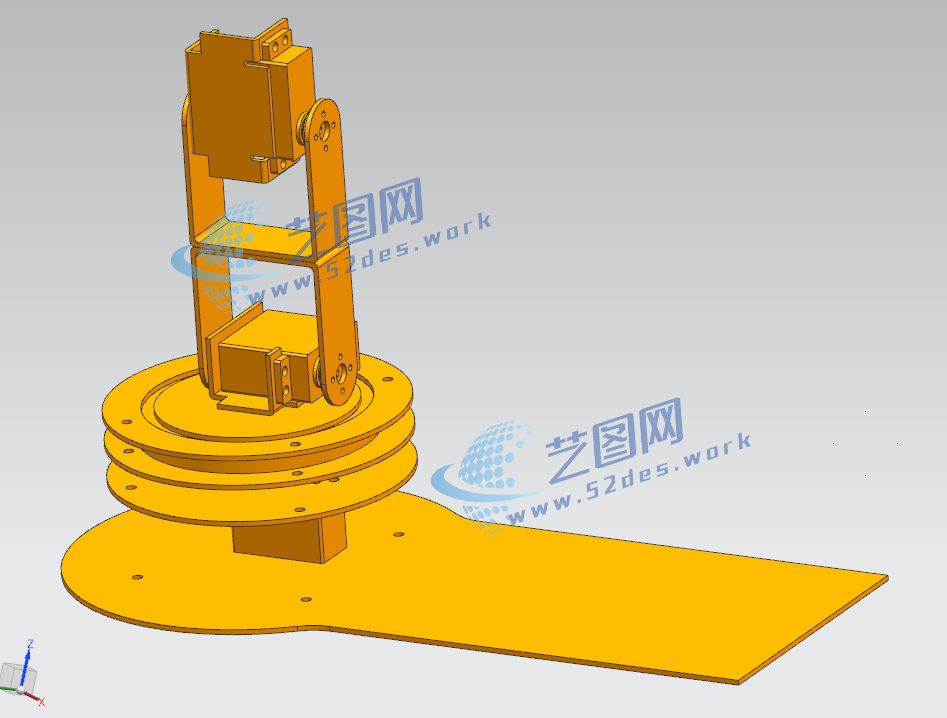 六轴物流搬运机械手UG三维装配模型
六轴物流搬运机械手UG三维装配模型 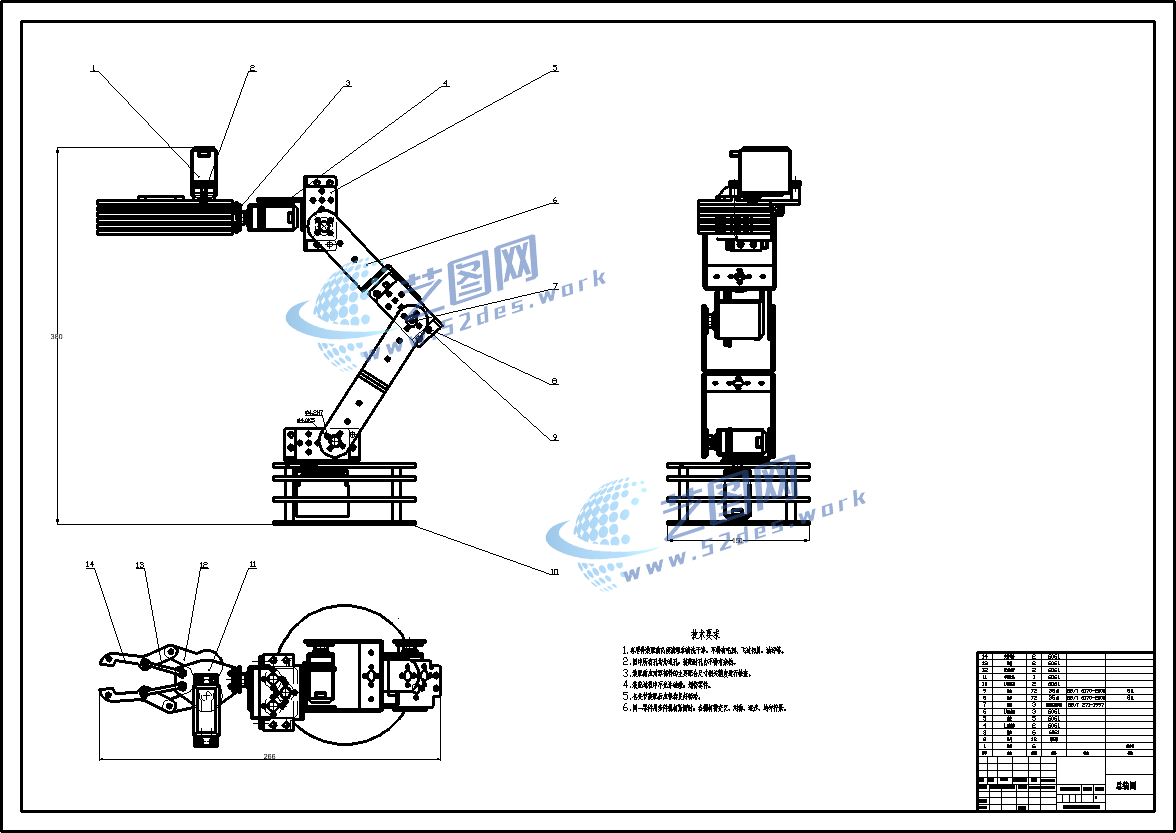 新国标CAD图纸:机械结构设计装配图
新国标CAD图纸:机械结构设计装配图 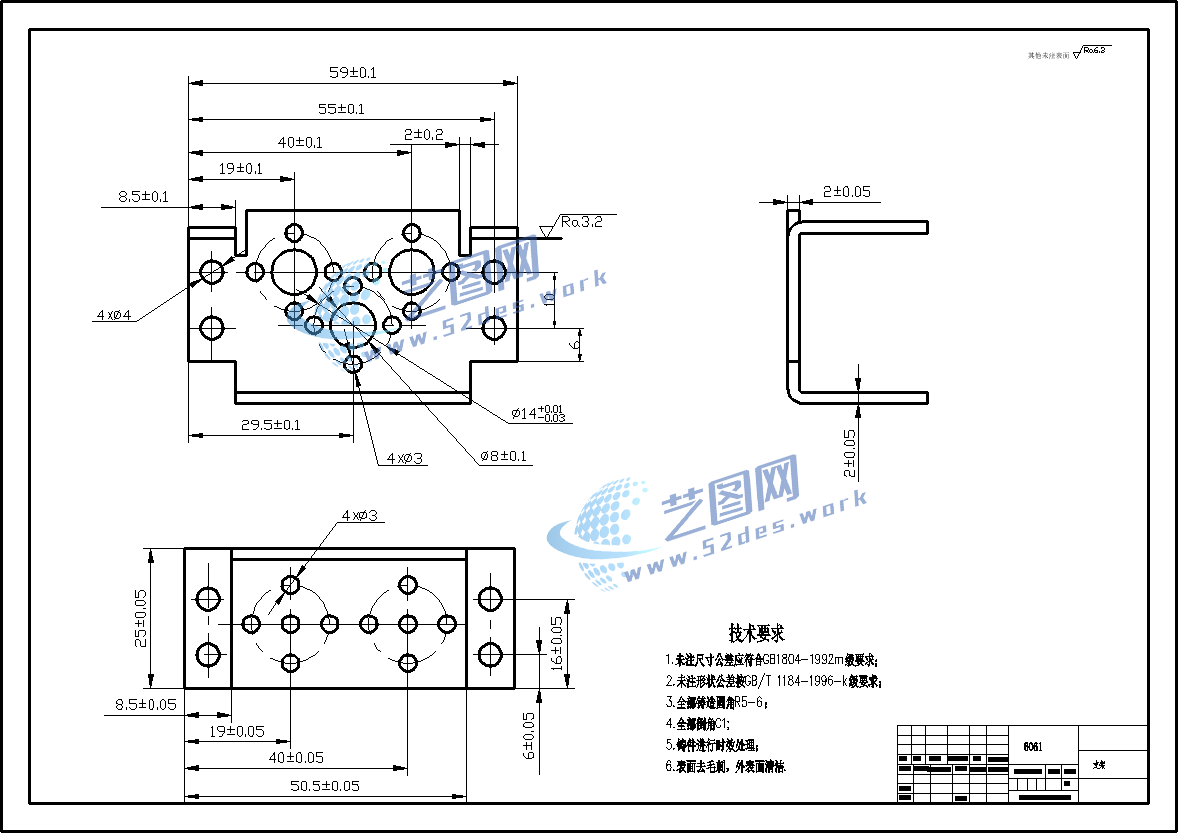 新国标CAD图纸:零件图
新国标CAD图纸:零件图 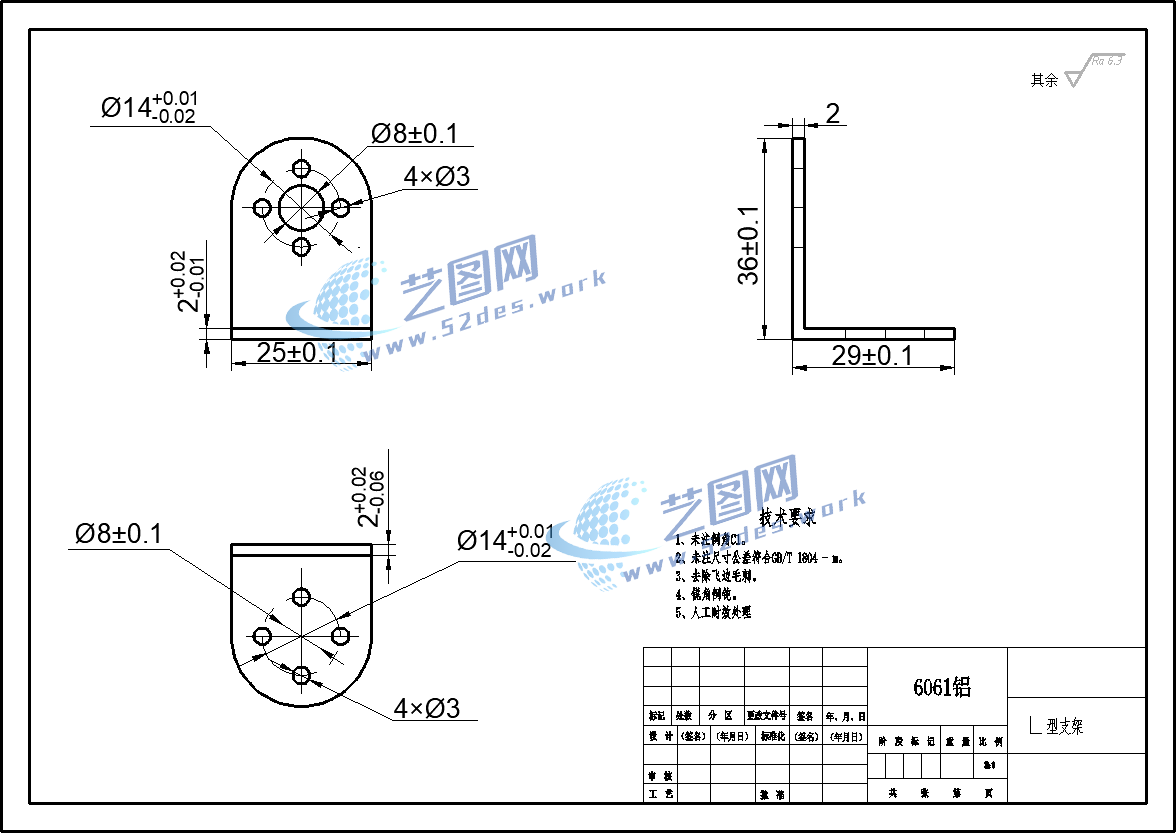 新国标CAD图纸:零件图
新国标CAD图纸:零件图 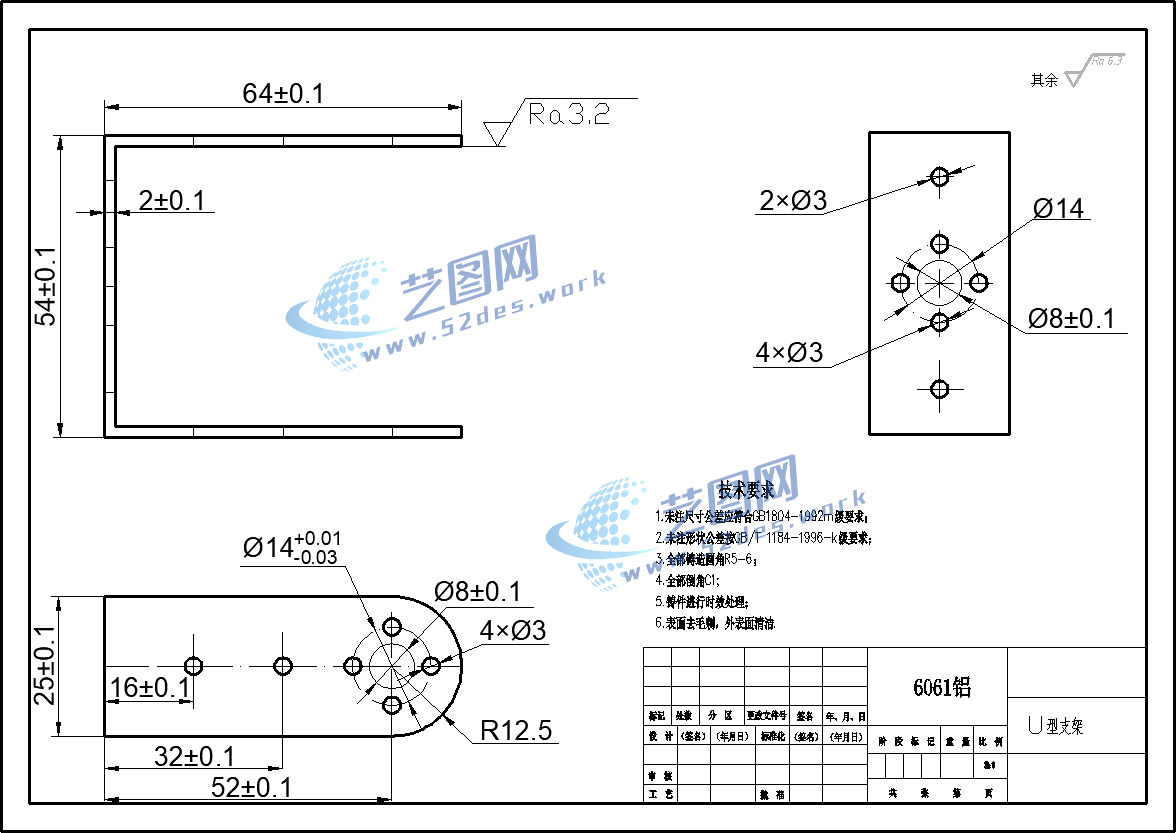 新国标CAD图纸:零件图
新国标CAD图纸:零件图 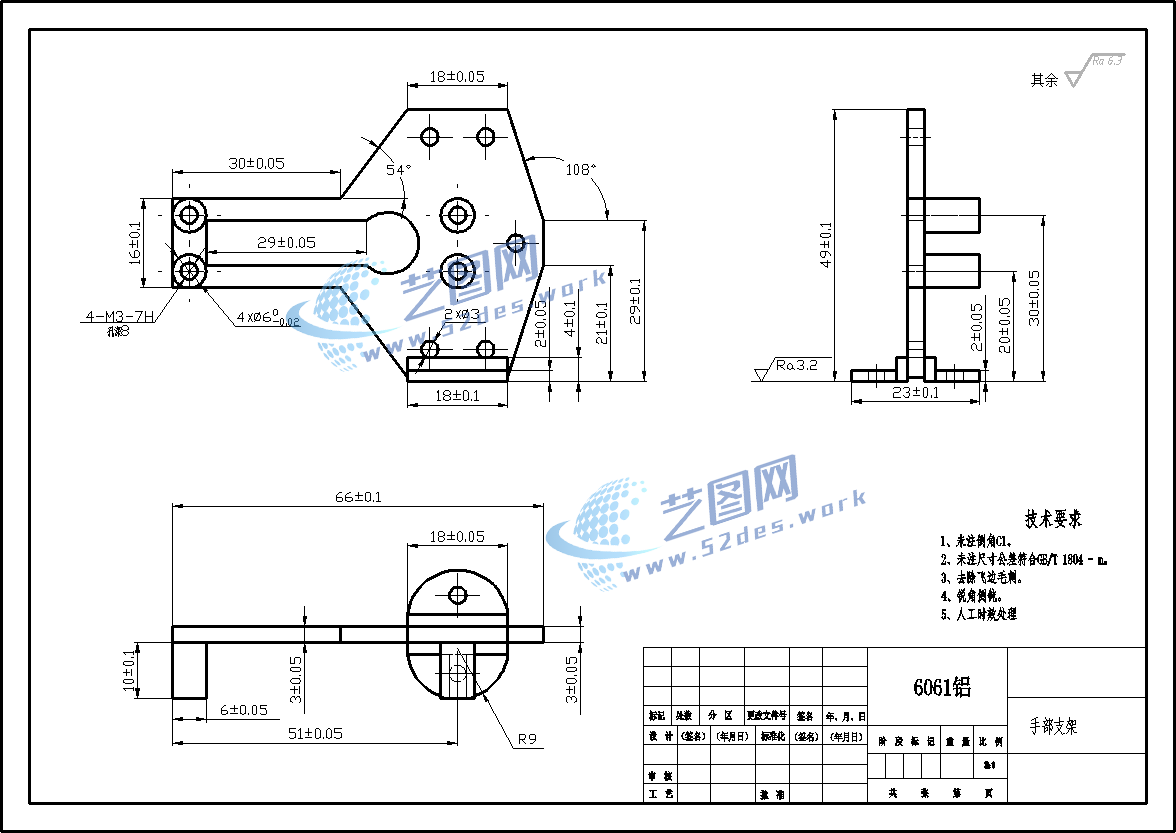 新国标CAD图纸:零件图
新国标CAD图纸:零件图 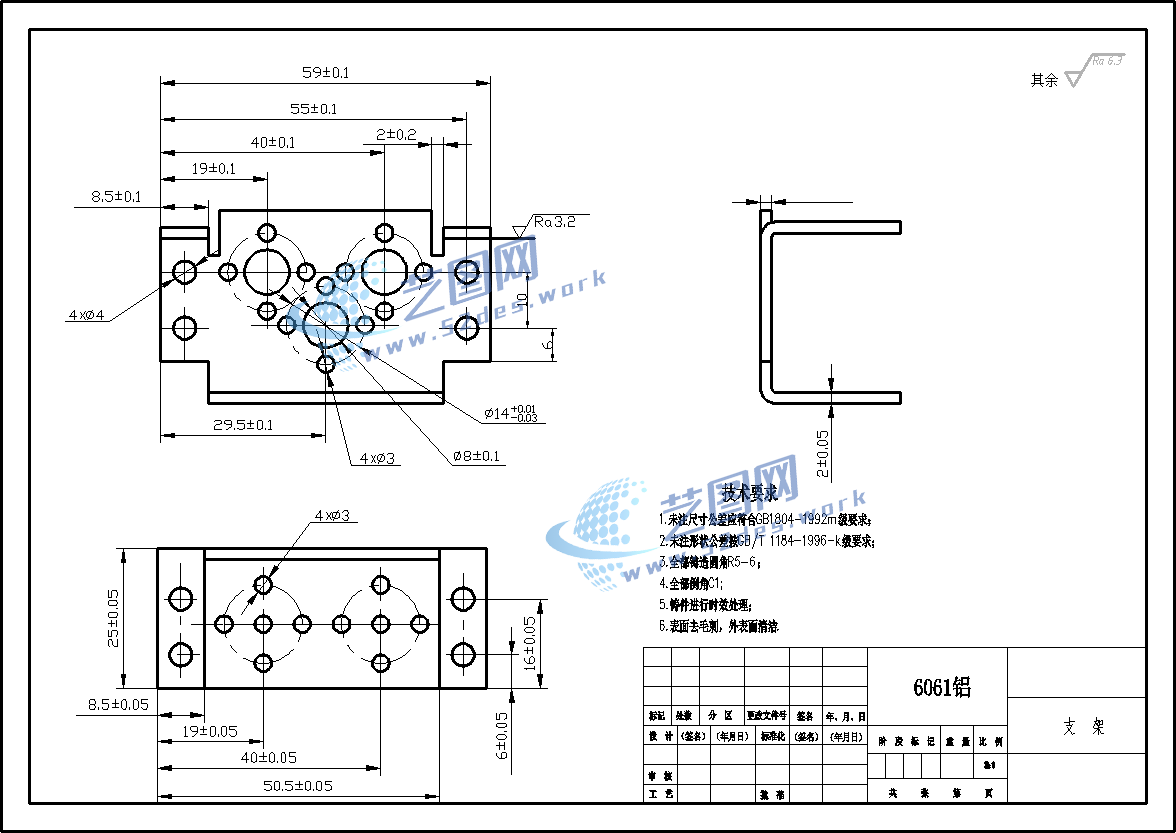 新国标CAD图纸:零件图
新国标CAD图纸:零件图 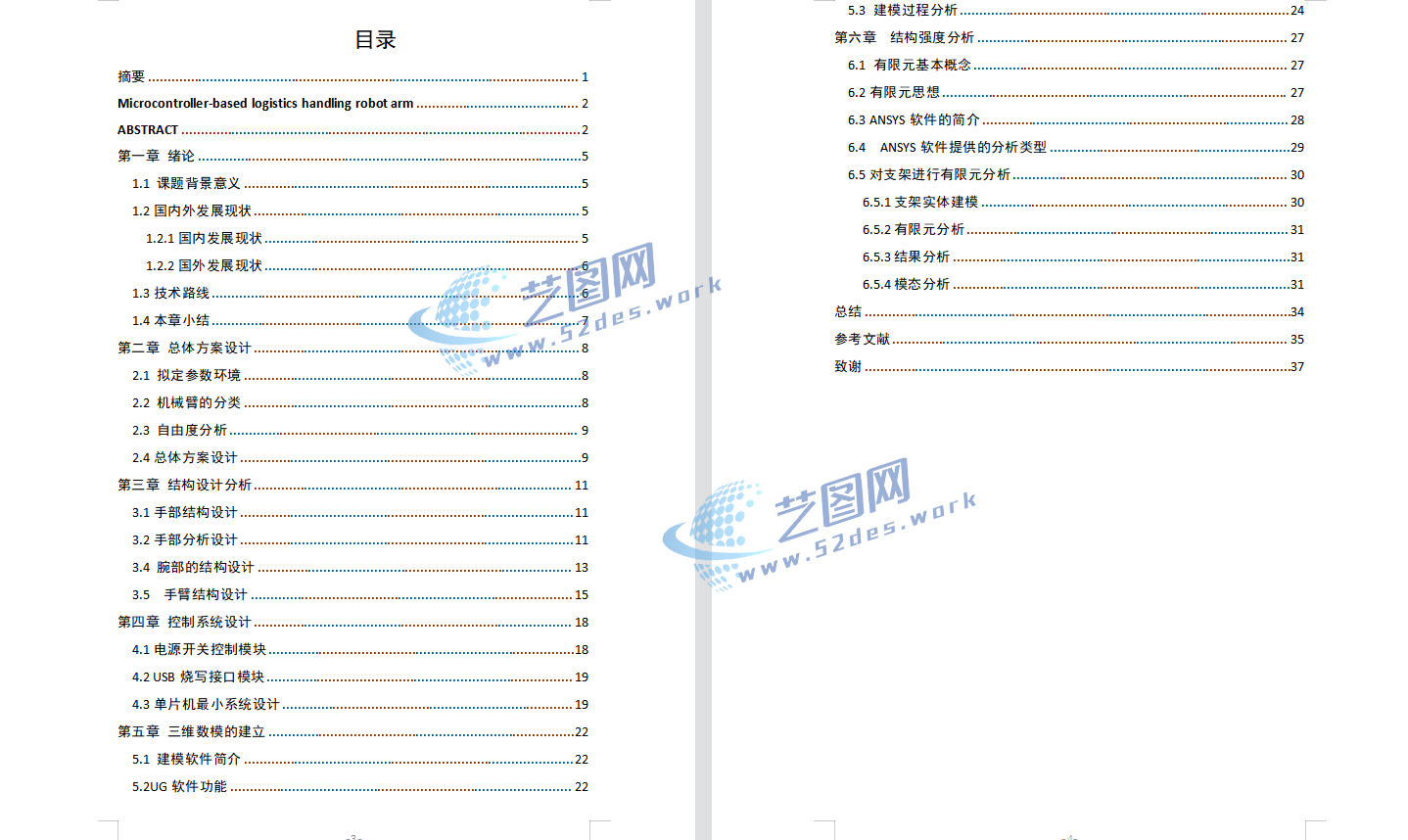 六轴物流搬运机械手设计说明书目录
六轴物流搬运机械手设计说明书目录 
随着社会的进步,物流搬运机械臂在人类的生活中扮演越来越重要的角色,但是传统的物流搬运机械臂刚性大不利于一些软质表面物体的夹取,物流搬运机械臂因此而诞生。通过对物流搬运行业的了解,需要多自由度机械臂才能实现搬运动作。为此,本次课题设计的物流搬运机械臂设计了多自由度搬运手臂可实现在特定空间内的搬运作业任务。对其进行结构设计并利用三维软件进行建模处理,并对其进行仿真分析并应用三维软件进行三维数模的建立。希望为未来的物流搬运机械臂设备提供可靠的参考依据。

