并联爬树机器人solidworks11版本模型源文件并联爬树机器人solidworks11版本、三维模型零件预览图并联爬树机器人solidworks11版本三维装配模型 并联爬树机器人solidworks11版本三维装配模型 并联爬树机器人设计以模仿生物运动为灵感,实现在不规则表面爬升的目标。采用轻量高强度材料,确保机器人在树干等复杂环境中具有灵活性和稳定性。利用并联机构的优势,提供多足并联支撑,增加机器人在垂直表面的附着力。搭载先进的感知系统,实现对周围环境的实时感知和智能导航。整体设计紧凑,具备自主运动和定位能力,为科学研究、环境监测等领域提供了一种创新的机器人解决方案。 三维模型
 并联爬树机器人solidworks11版本模型源文件
并联爬树机器人solidworks11版本模型源文件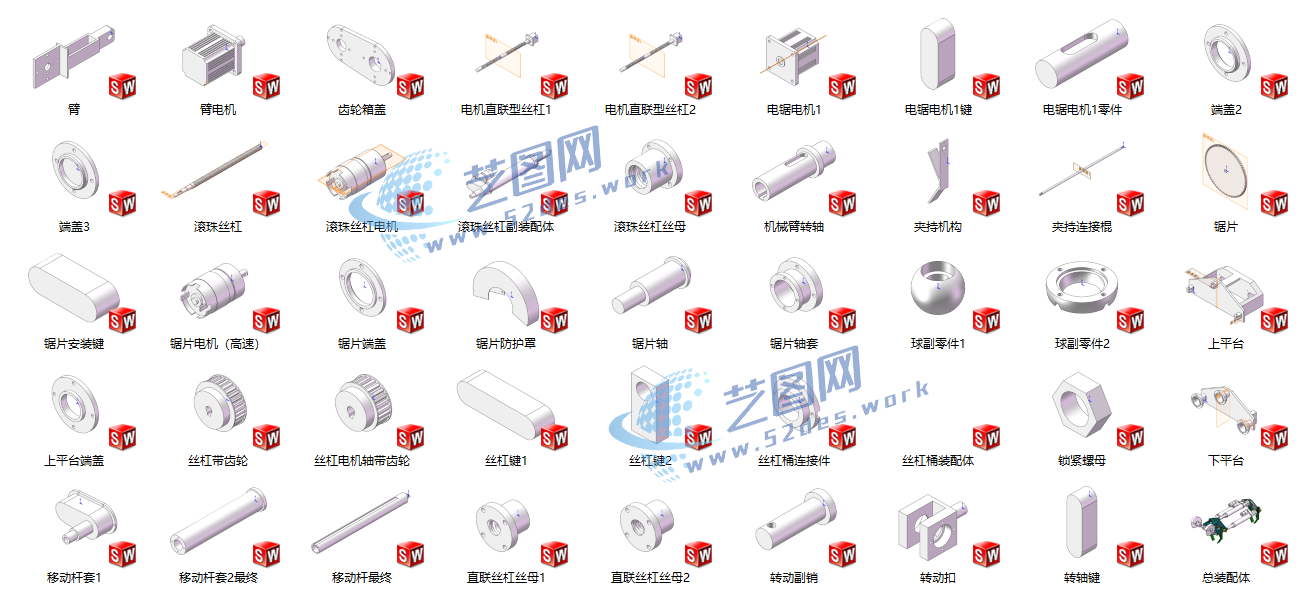 并联爬树机器人solidworks11版本、三维模型零件预览图
并联爬树机器人solidworks11版本、三维模型零件预览图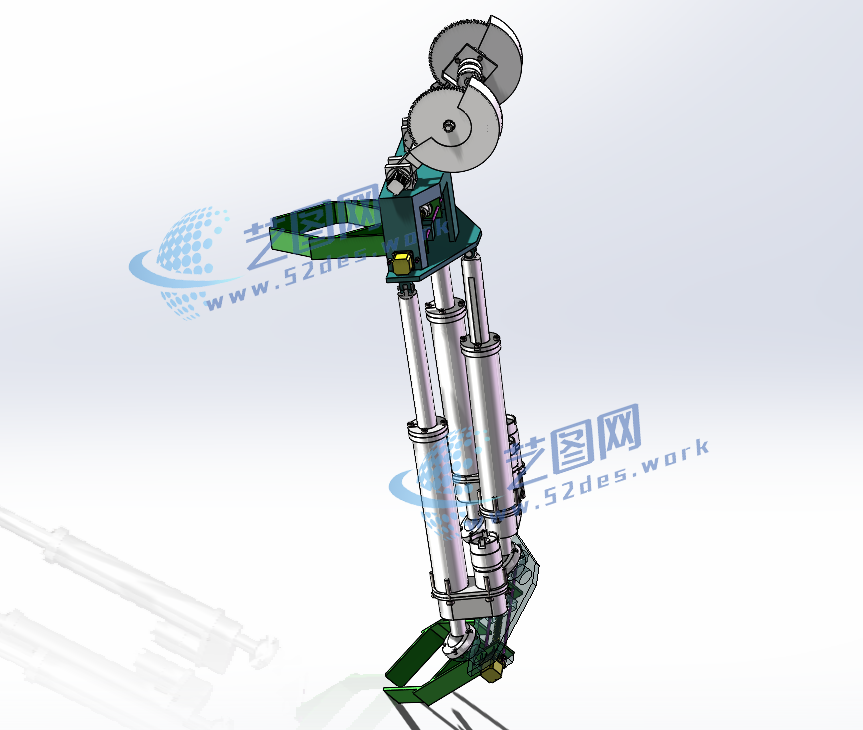 并联爬树机器人solidworks11版本三维装配模型
并联爬树机器人solidworks11版本三维装配模型 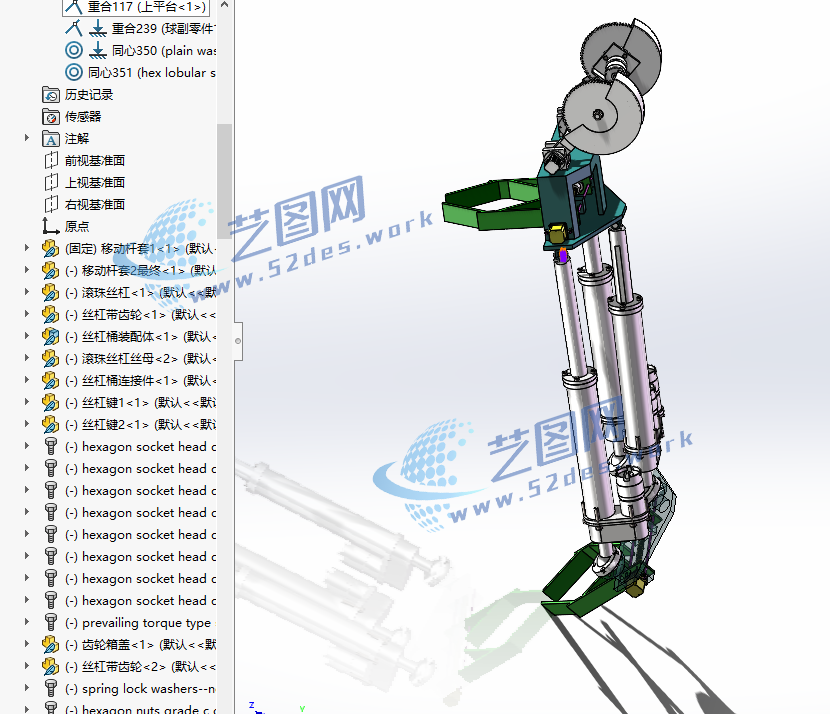 并联爬树机器人solidworks11版本三维装配模型
并联爬树机器人solidworks11版本三维装配模型 


