
 爬管机器人solidworks通用版本模型源文件
爬管机器人solidworks通用版本模型源文件  爬管机器人solidworks通用版本三维装配模型
爬管机器人solidworks通用版本三维装配模型 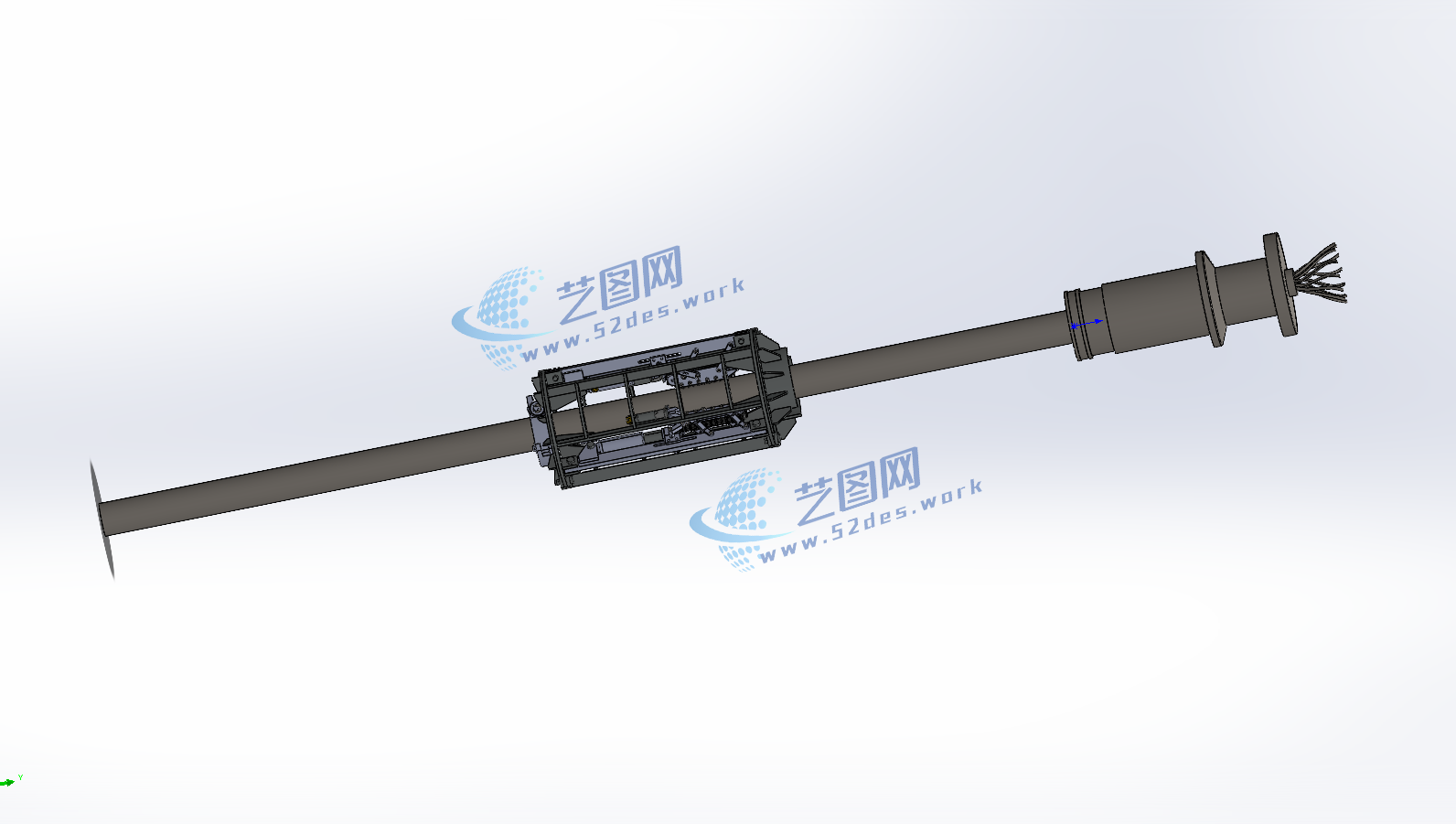 爬管机器人solidworks通用版本三维装配模型
爬管机器人solidworks通用版本三维装配模型  爬管机器人solidworks通用版本三维装配模型
爬管机器人solidworks通用版本三维装配模型 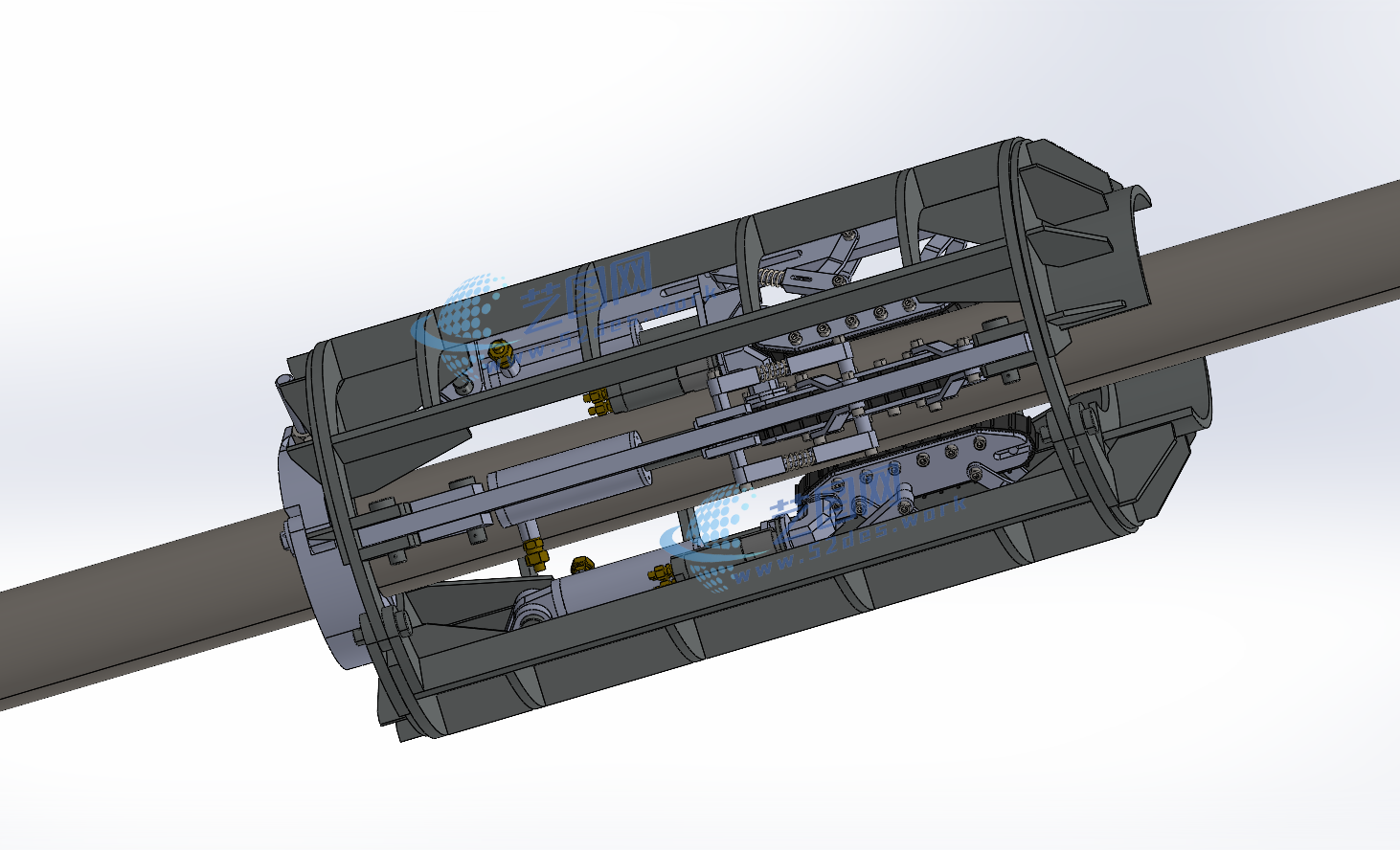
爬管机器人的结构通常包括机体、爬行机构、传感器和控制单元。机体是整个机器人的主体部分,通常具有坚固的外壳和密封设计,以适应不同环境,如管道、管道或其他狭窄空间。爬行机构包括轮子、履带或类似的运动装置,使机器人能够在管道内移动和爬行。传感器用于感知环境,例如测量管道的直径、检测障碍物或监测管道内部的情况。

