
 悬臂式多轴抓取机构solidworks20版本模型源文件,可编辑
悬臂式多轴抓取机构solidworks20版本模型源文件,可编辑  悬臂式多轴抓取机构solidworks20版本、三维模型零件预览图
悬臂式多轴抓取机构solidworks20版本、三维模型零件预览图 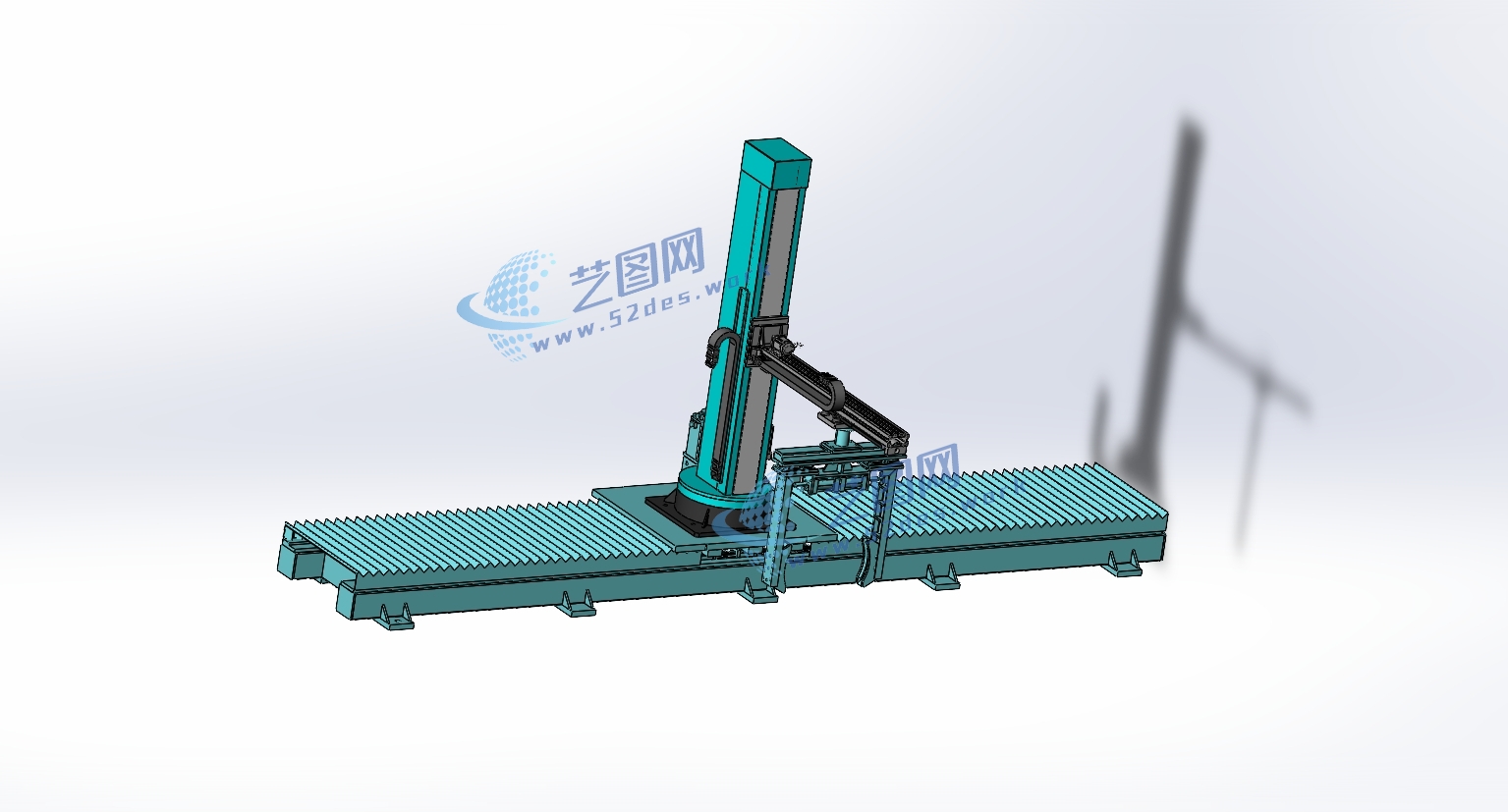 悬臂式多轴抓取机构solidworks20版本三维装配模型
悬臂式多轴抓取机构solidworks20版本三维装配模型 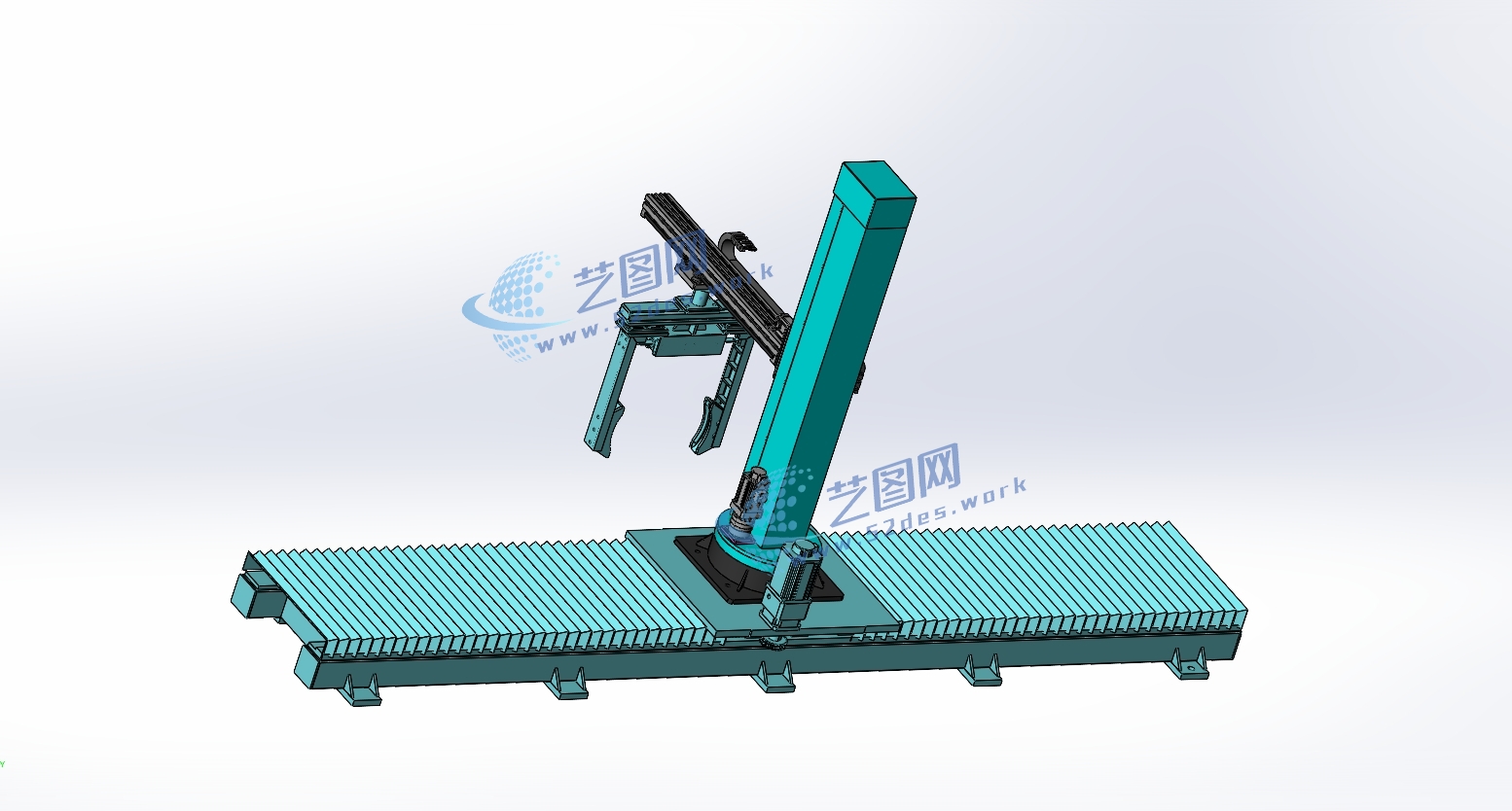 悬臂式多轴抓取机构solidworks20版本三维装配模型
悬臂式多轴抓取机构solidworks20版本三维装配模型 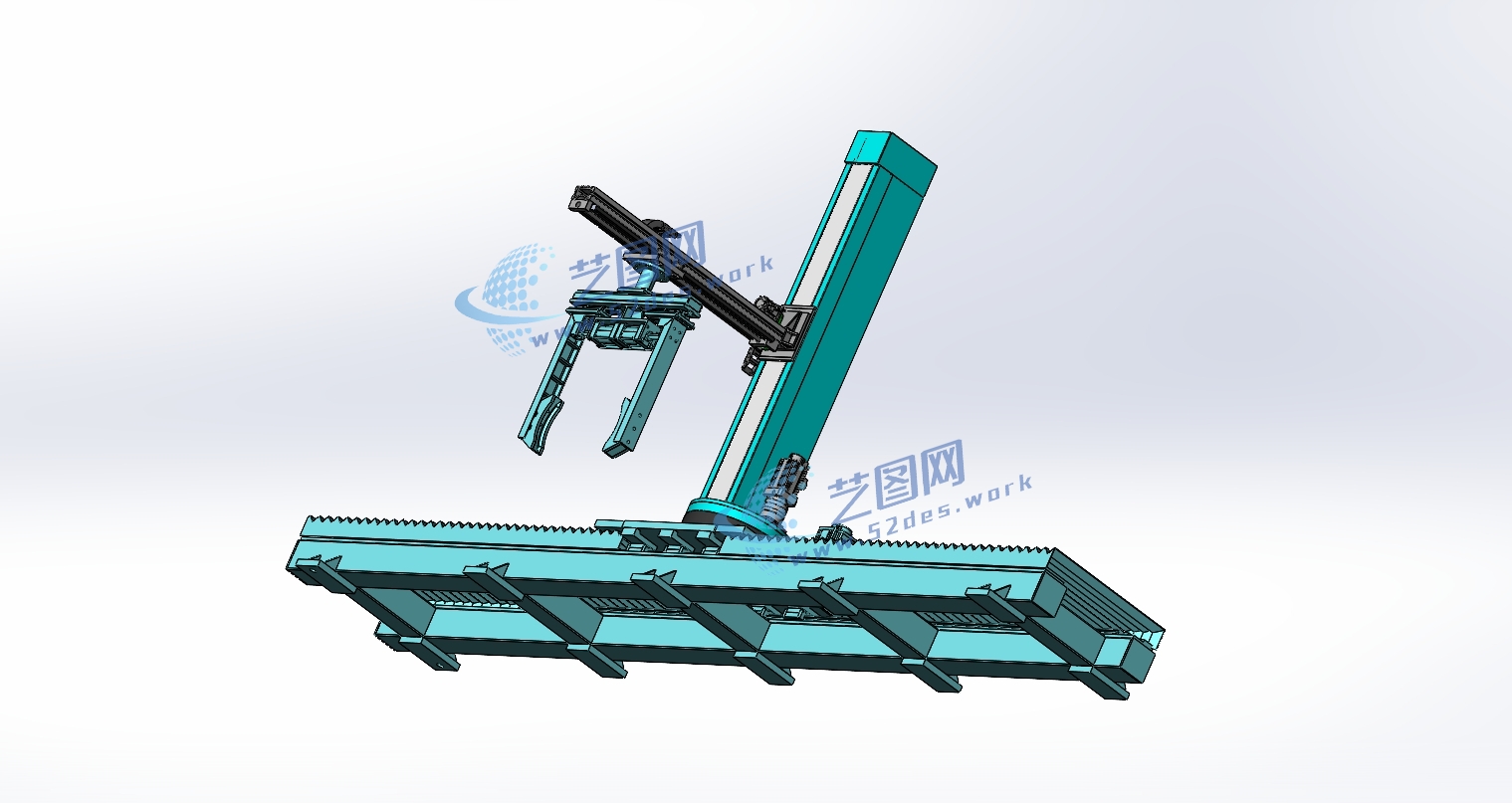 悬臂式多轴抓取机构solidworks20版本三维装配模型
悬臂式多轴抓取机构solidworks20版本三维装配模型 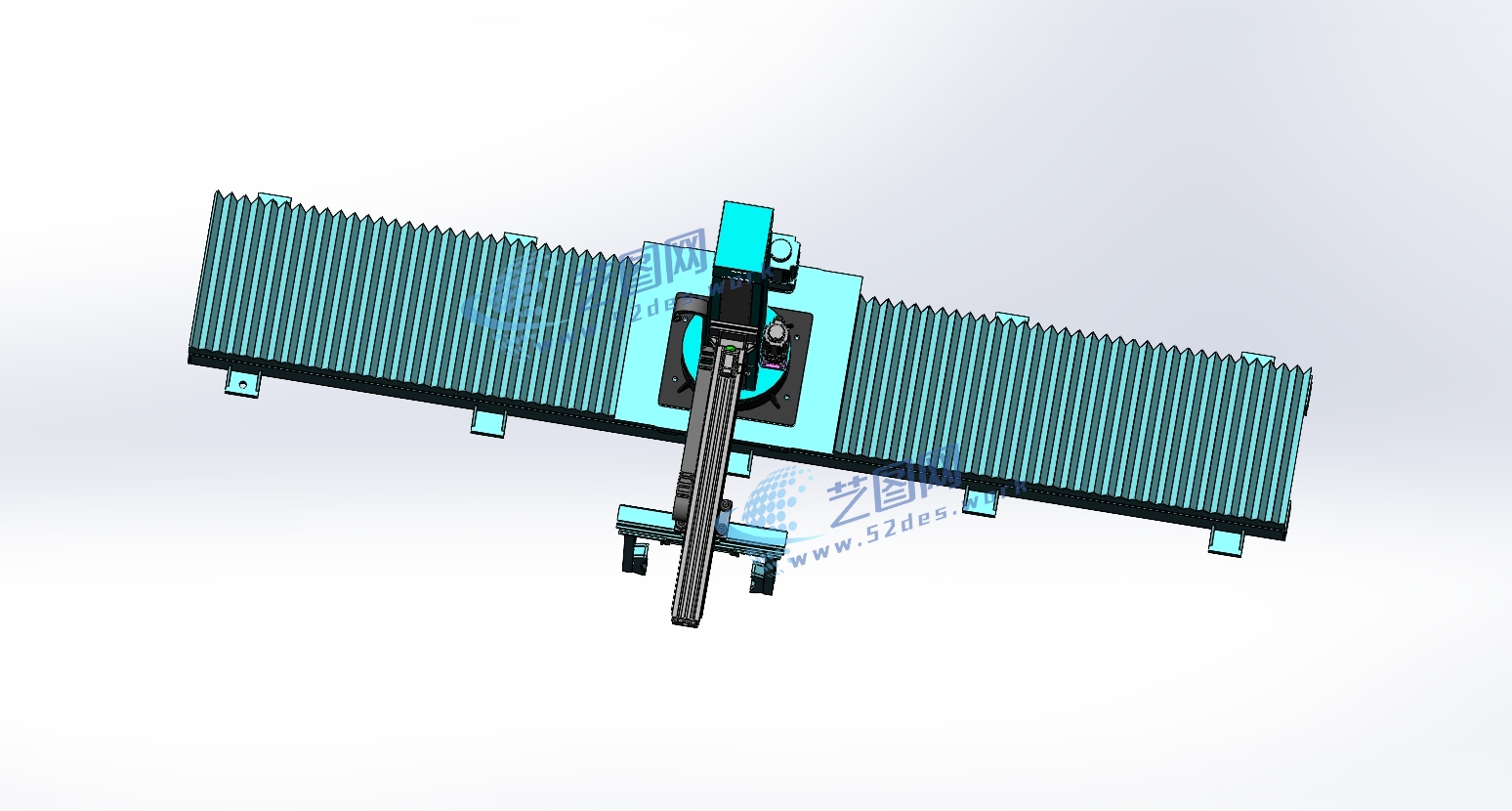
悬臂式多轴抓取结构是一种用于自动化装配、物料处理和机器人应用的设计,它的主要特点是机械臂或抓取装置悬挂在一个固定的支架或基座上,具有多轴自由度。这种结构设计通常包括一个坚固的基座,支撑着一个或多个关节式机械臂,这些机械臂具备多个旋转关节,使其能够在多个方向上移动、旋转和伸缩,以适应各种不同的操作需求。

