
 双机械手抓取机构solidworks20版本模型源文件,不可编辑
双机械手抓取机构solidworks20版本模型源文件,不可编辑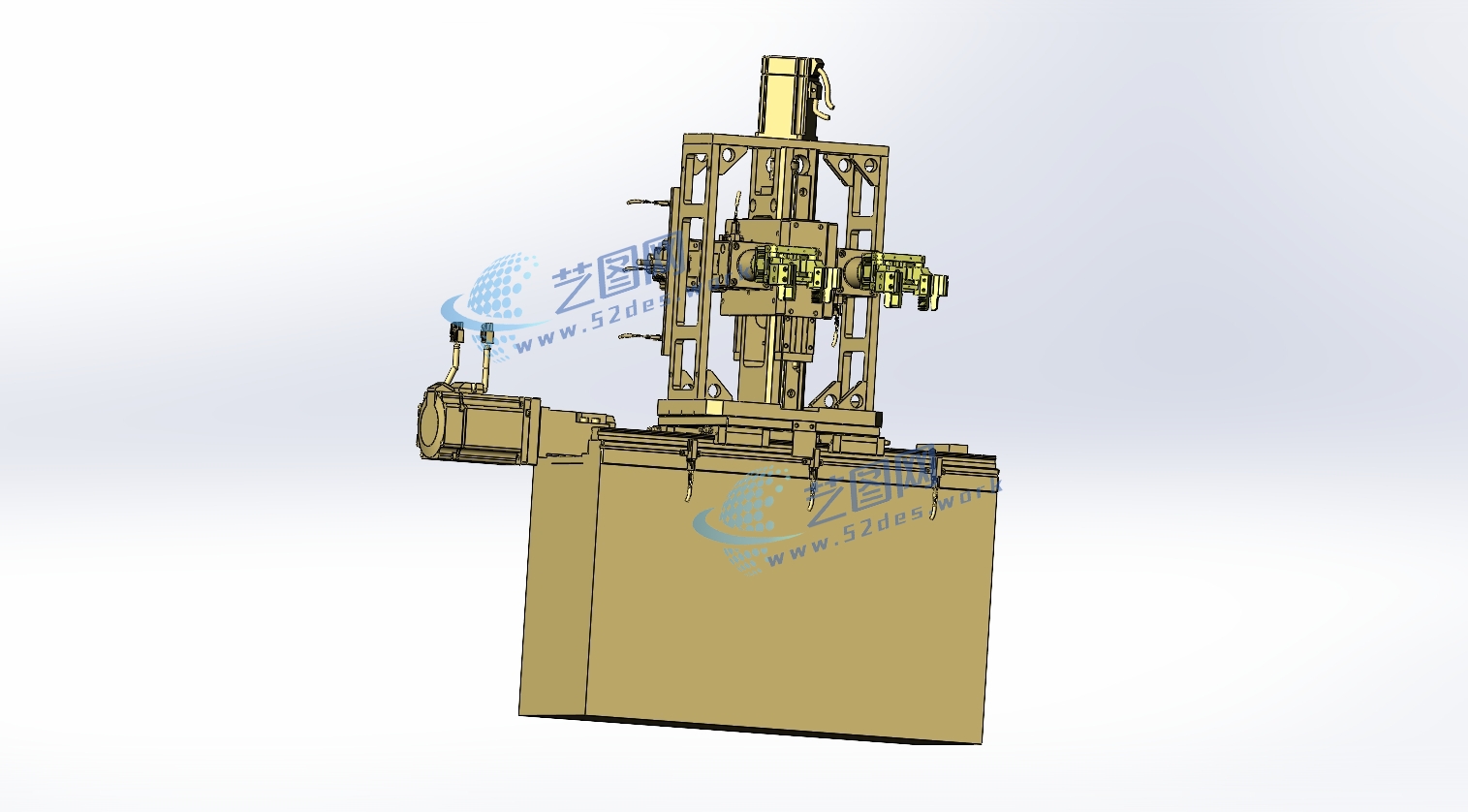 双机械手抓取机构solidworks20版本三维装配模型
双机械手抓取机构solidworks20版本三维装配模型 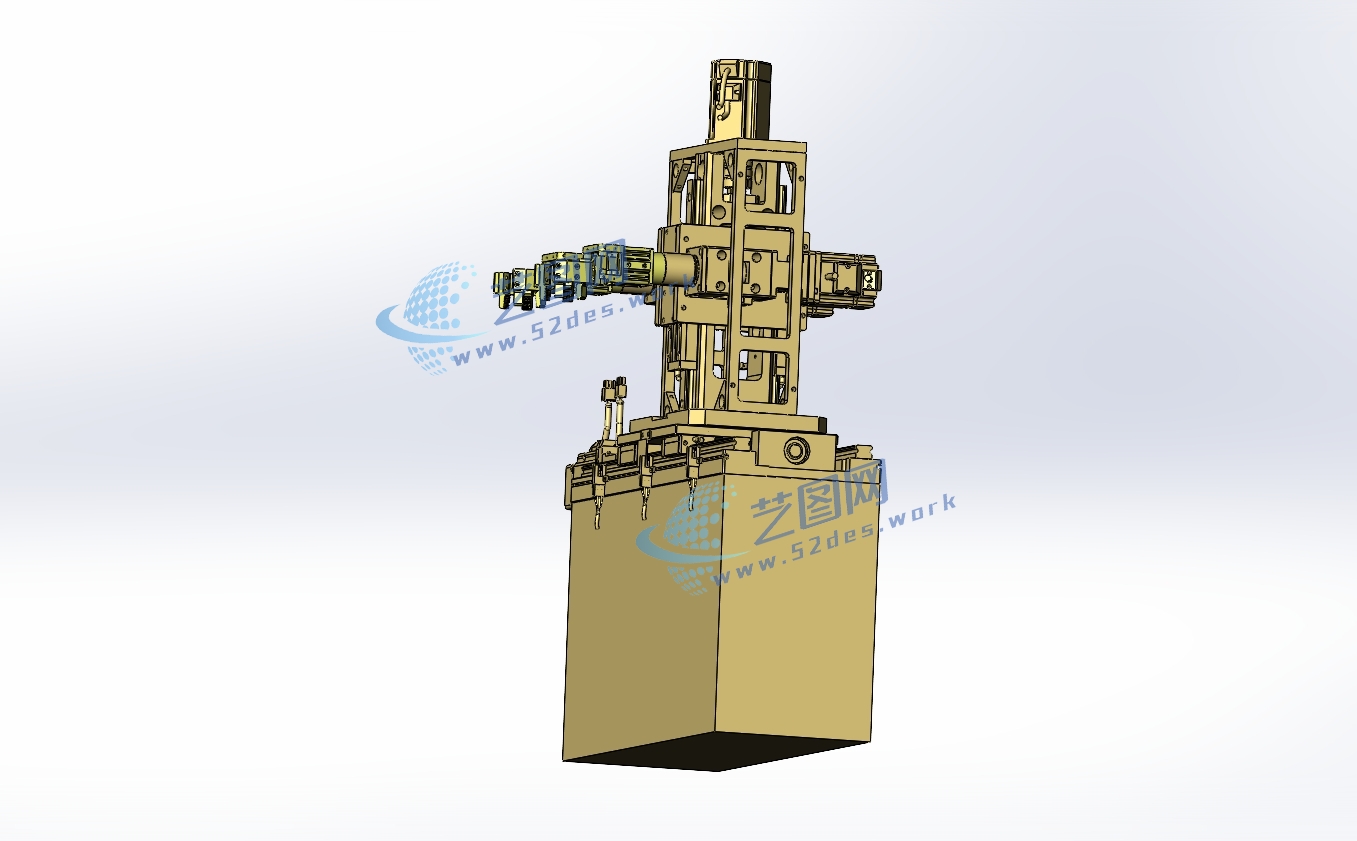 双机械手抓取机构solidworks20版本三维装配模型
双机械手抓取机构solidworks20版本三维装配模型 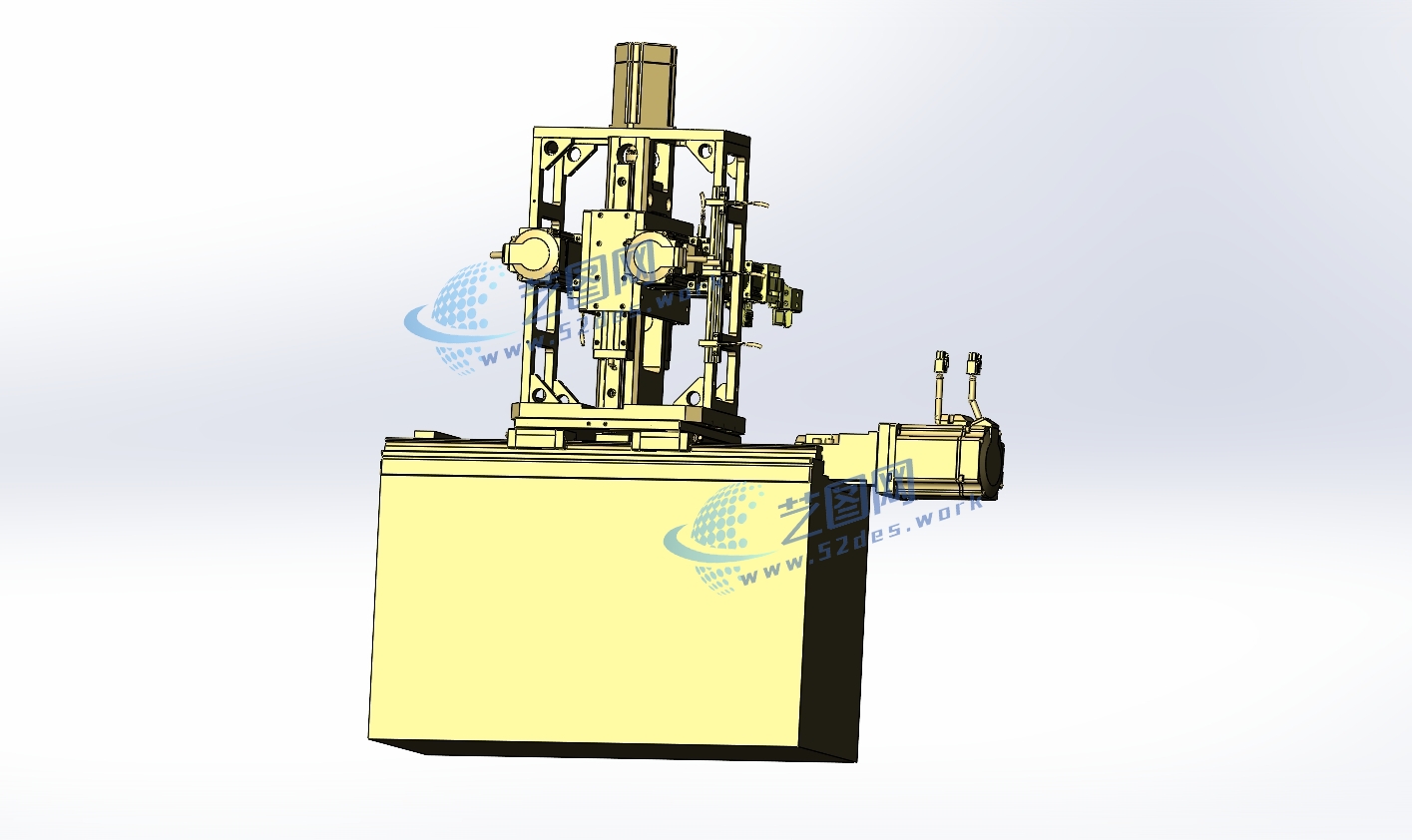 双机械手抓取机构solidworks20版本三维装配模型
双机械手抓取机构solidworks20版本三维装配模型 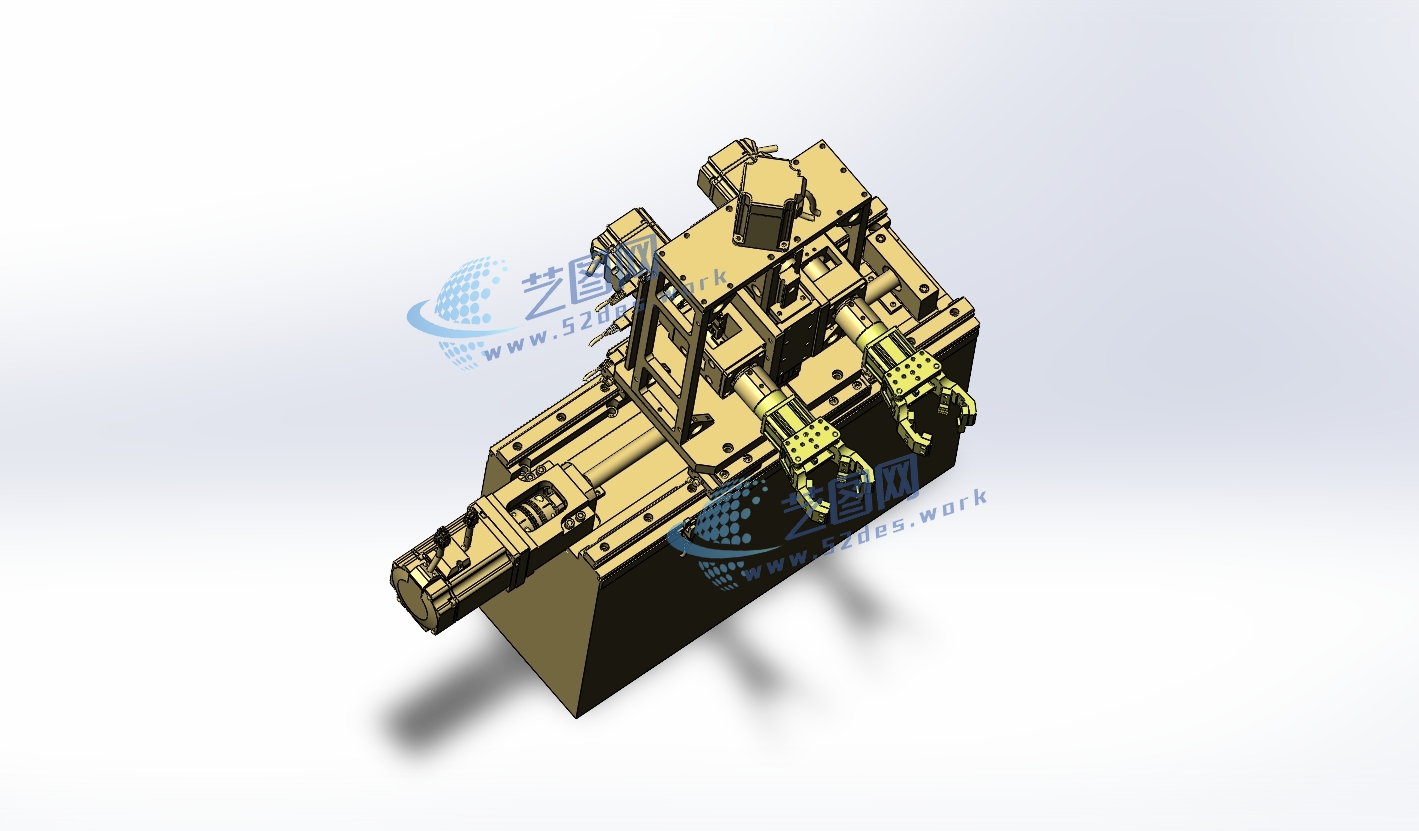
双机械手抓取机构的结构设计旨在实现协同抓取和精准操控的目标。该机构通常包括两个机械手臂、抓取器、传感器和控制系统。机械手臂可以独立运动,并且协同工作以完成复杂的抓取任务。抓取器设计用于夹持、抓取、旋转或放置目标物体,通常具有可调节的夹持力和多种夹持形式。传感器用于感知环境、目标物体的位置和状态,以协助机械手臂的运动和抓取过程。

