
 新抓手solidworks11版本模型源文件,可编辑
新抓手solidworks11版本模型源文件,可编辑  新抓手solidworks11版本、三维模型零件预览图
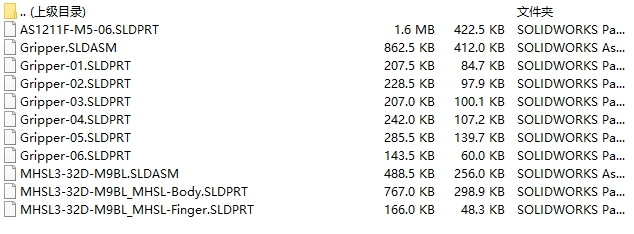
新抓手solidworks11版本、三维模型零件预览图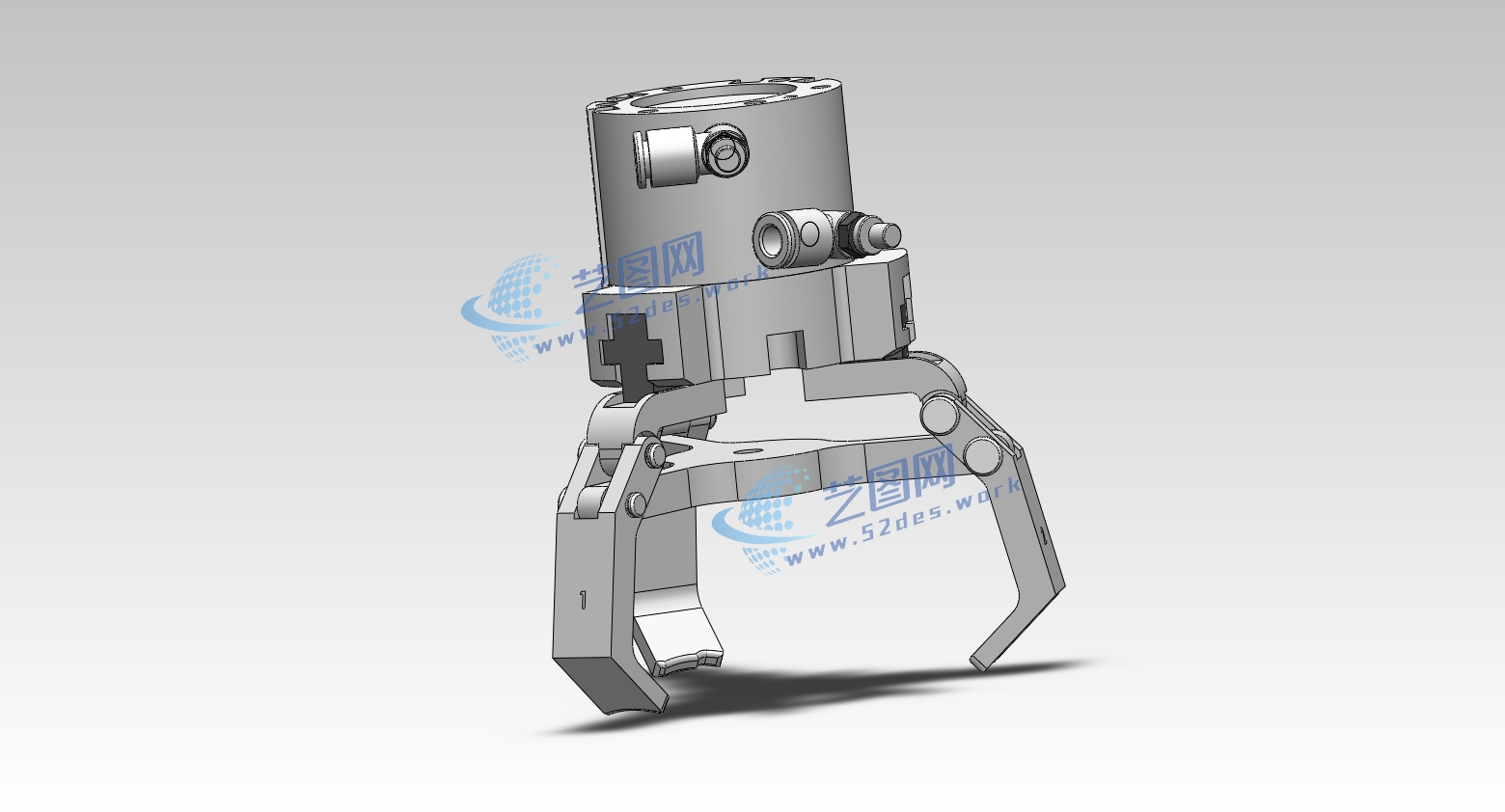 新抓手solidworks11版本三维装配模型
新抓手solidworks11版本三维装配模型 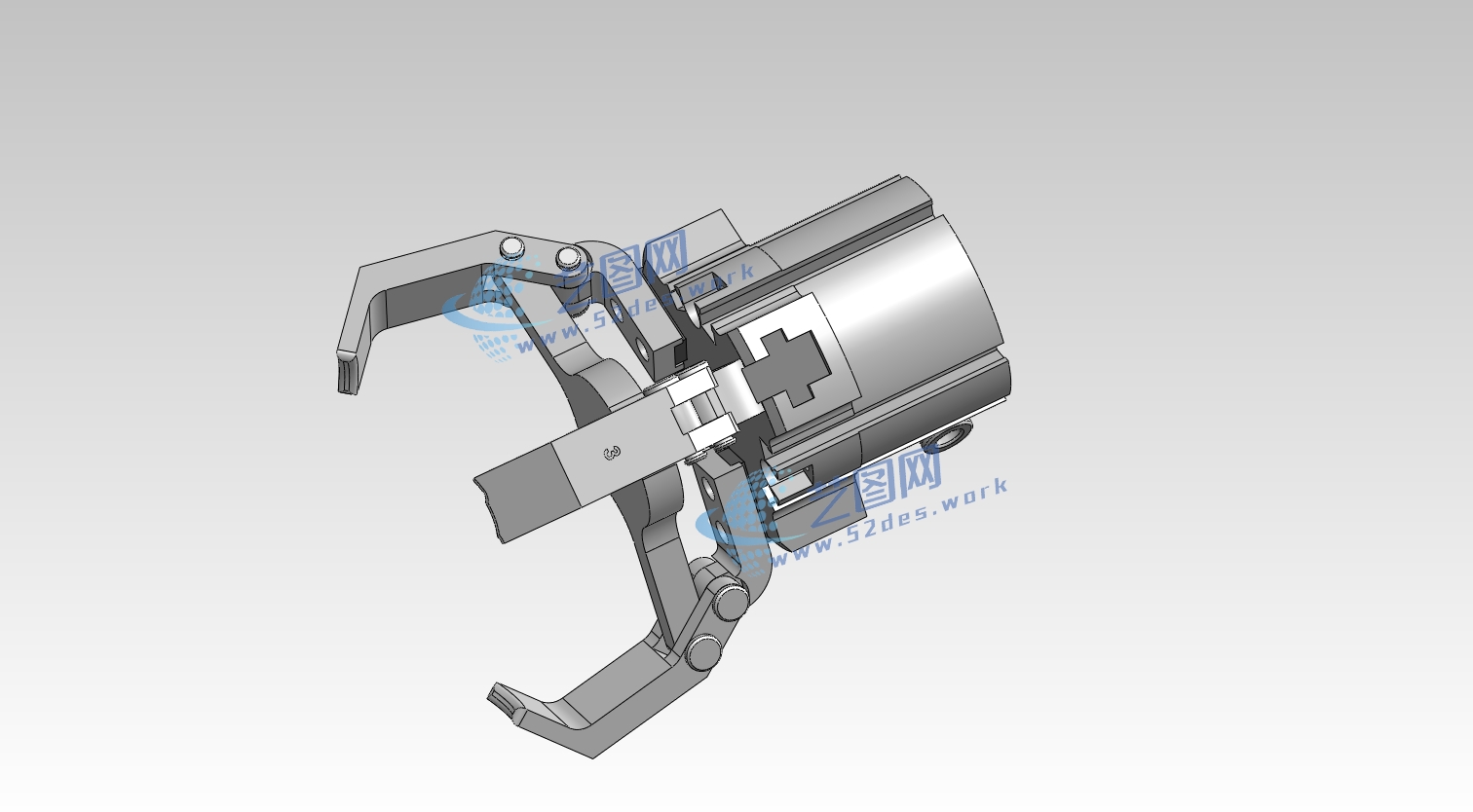 新抓手solidworks11版本三维装配模型
新抓手solidworks11版本三维装配模型  新抓手solidworks11版本三维装配模型
新抓手solidworks11版本三维装配模型 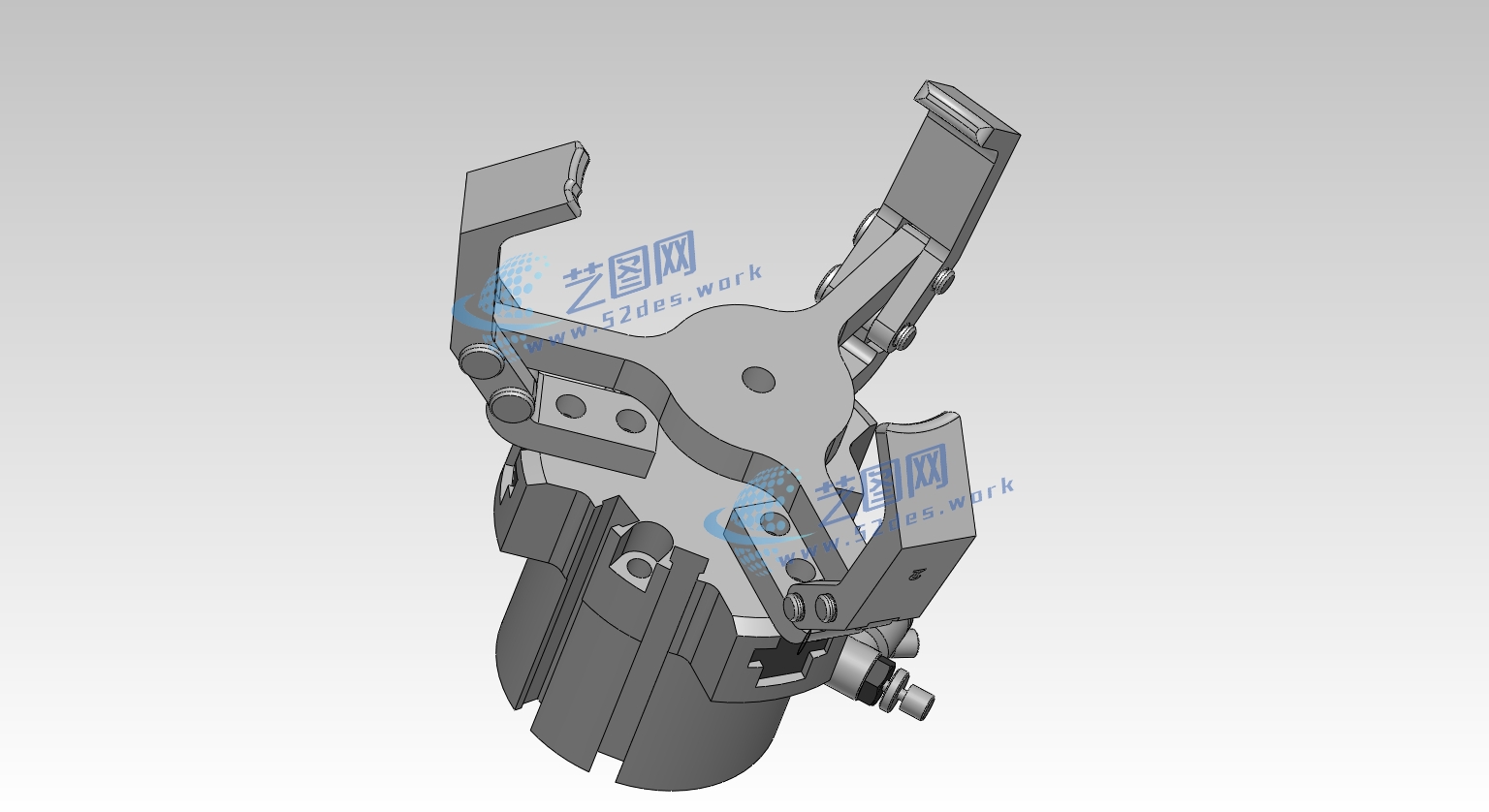
新抓手是一种专为搬运、抓取和操作物体而设计的机械装置,其设计旨在提供更高的精度、效率和适应性。这种抓手通常由机械臂、夹爪、传感器、控制系统和电动机等组成。它可以用于各种应用,包括制造业中的自动化装配线、仓储中的物料搬运,以及机器人领域中的精密操作。
新抓手的设计关键在于提供更灵活的抓取和操控功能,以适应不同形状、尺寸和重量的物体。传感器帮助抓手感知物体的位置和特性,而控制系统则确保抓取过程的精确性和可控性。这种设备有助于提高生产效率、减少人工操作,同时在工业和机器人应用中提供更多创新和自动化可能性,最后采用计算机图形设计辅助软件CAD和solidworks完成二维图纸或者三维图纸或者说明书的绘制和编写。(艺图网:https://www.52des.work/)

