
 玻璃幕墙清洁机器人solidworks14版本模型源文件,可编辑
玻璃幕墙清洁机器人solidworks14版本模型源文件,可编辑 
 玻璃幕墙清洁机器人solidworks14版本、三维模型零件预览图
玻璃幕墙清洁机器人solidworks14版本、三维模型零件预览图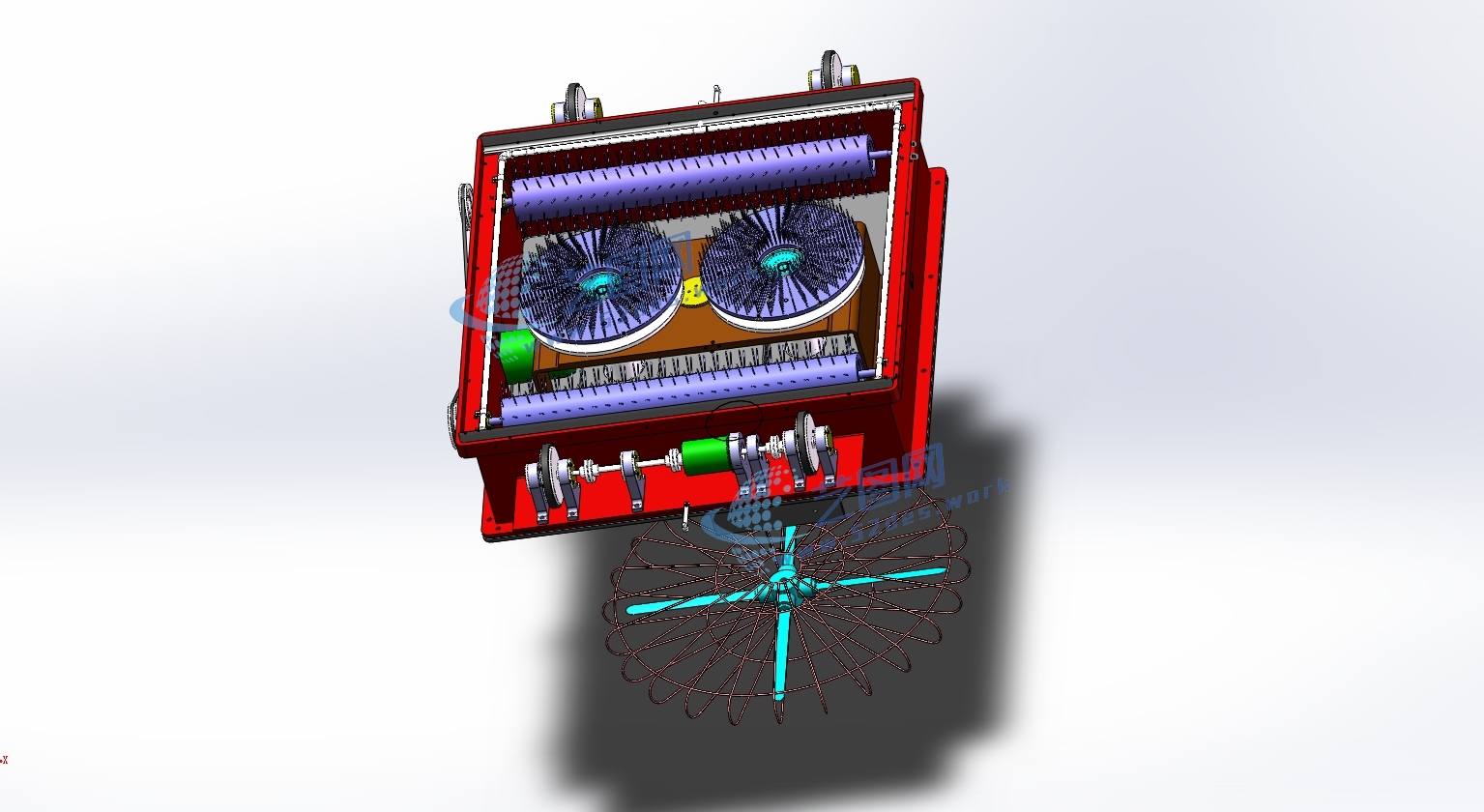 玻璃幕墙清洁机器人solidworks14版本三维装配模型
玻璃幕墙清洁机器人solidworks14版本三维装配模型 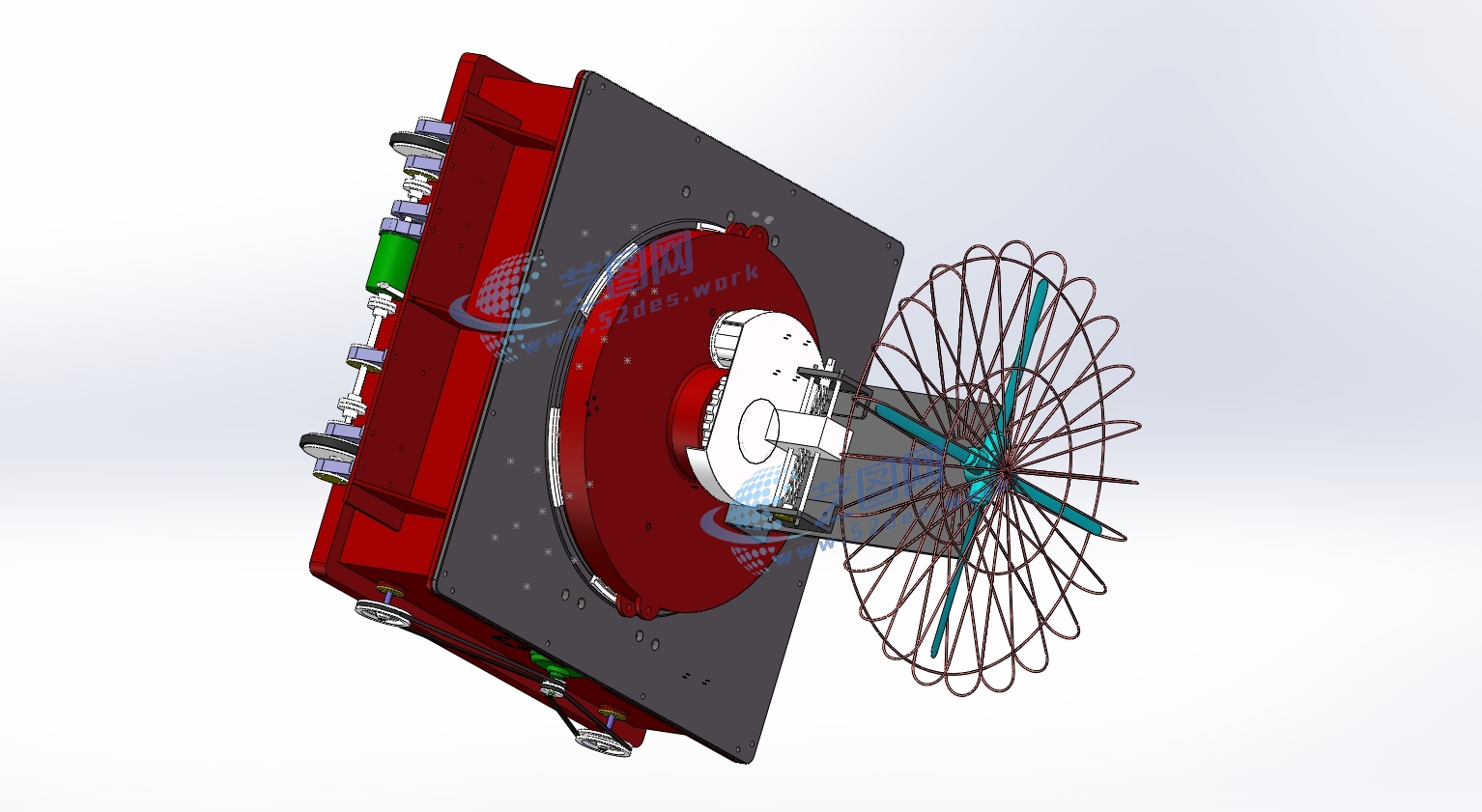 玻璃幕墙清洁机器人solidworks14版本三维装配模型
玻璃幕墙清洁机器人solidworks14版本三维装配模型 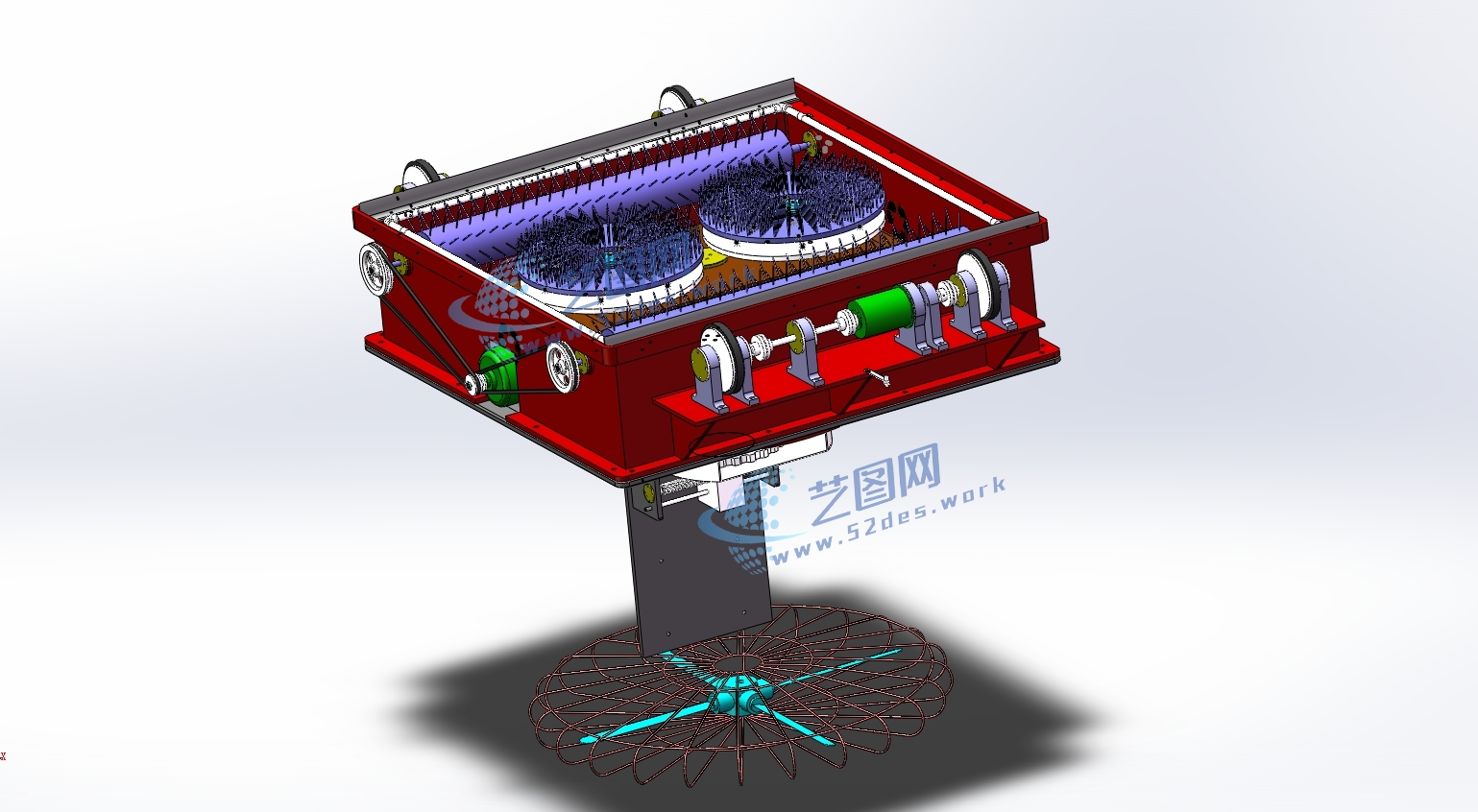 玻璃幕墙清洁机器人solidworks14版本三维装配模型
玻璃幕墙清洁机器人solidworks14版本三维装配模型 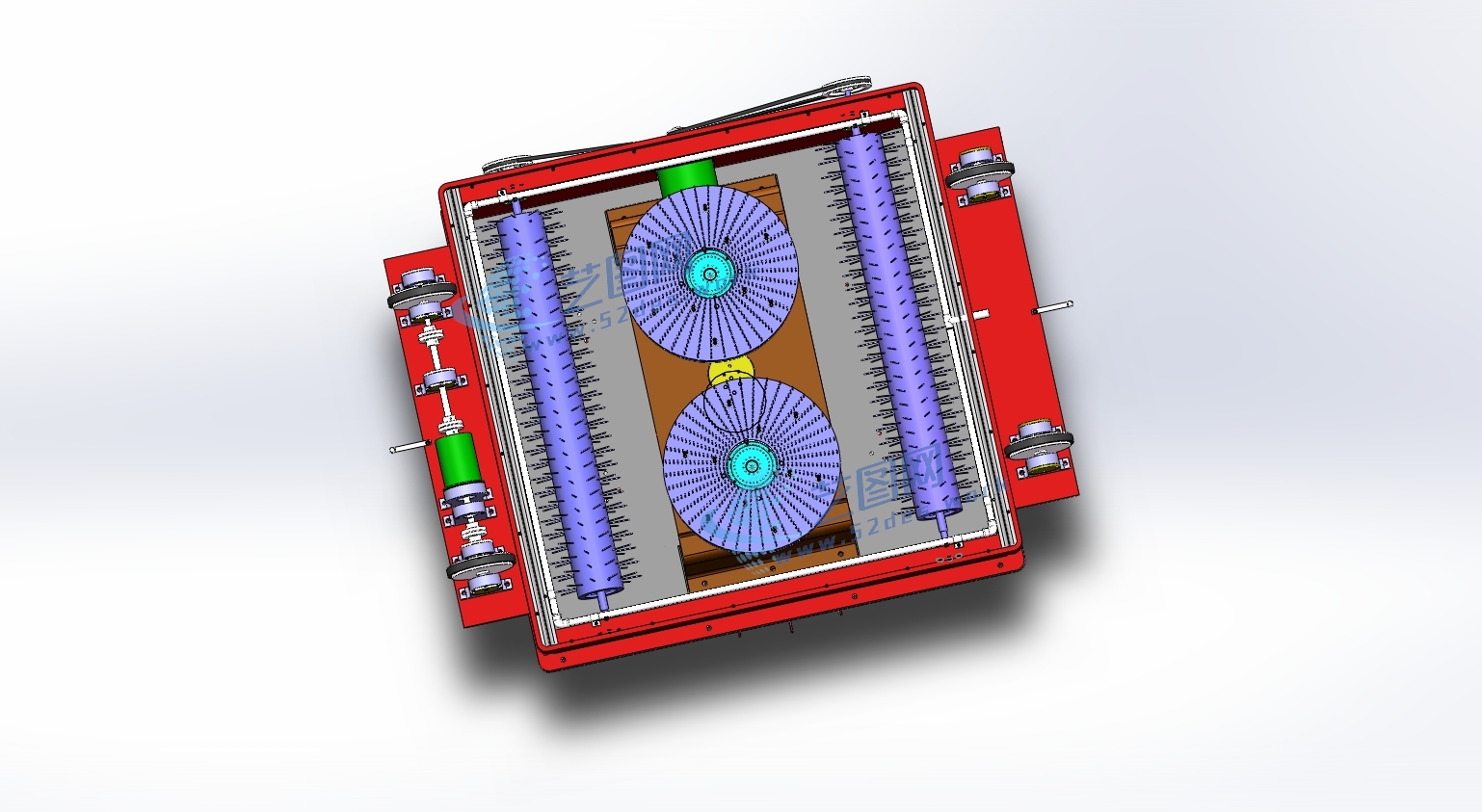
玻璃幕墙清洁机器人的结构设计包括一个坚固的机身,上面配置了轮式或履带底盘、清洁装置、控制单元、传感器组和电源系统。底盘系统提供了机器人的机动性和移动能力,使其能够在垂直或水平玻璃表面上自由移动。清洁装置通常包括清洁刷、吸尘装置或清洁喷嘴,用于清洁污渍和尘埃。控制单元协调清洁装置的操作,以实现高效的清洁过程和路径规划。传感器组包括距离传感器、触摸传感器和视觉传感器,用于感知环境、障碍物检测和导航。电源系统为机器人提供所需的电力,通常使用可充电电池。整个结构设计旨在提供自动、高效的玻璃幕墙清洁功能,适用于建筑物维护和清洁领域,以提高工作效率和安全性。

