
 履带行走机器人solidworks20版本模型源文件,可编辑
履带行走机器人solidworks20版本模型源文件,可编辑  履带行走机器人solidworks20版本、三维模型零件预览图
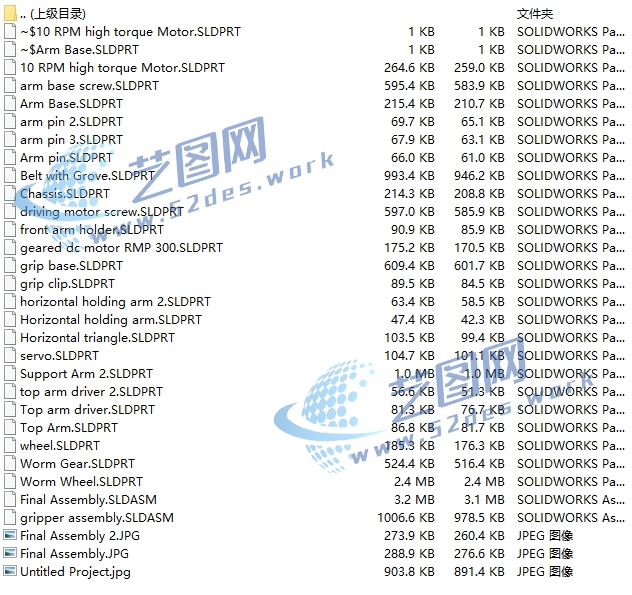
履带行走机器人solidworks20版本、三维模型零件预览图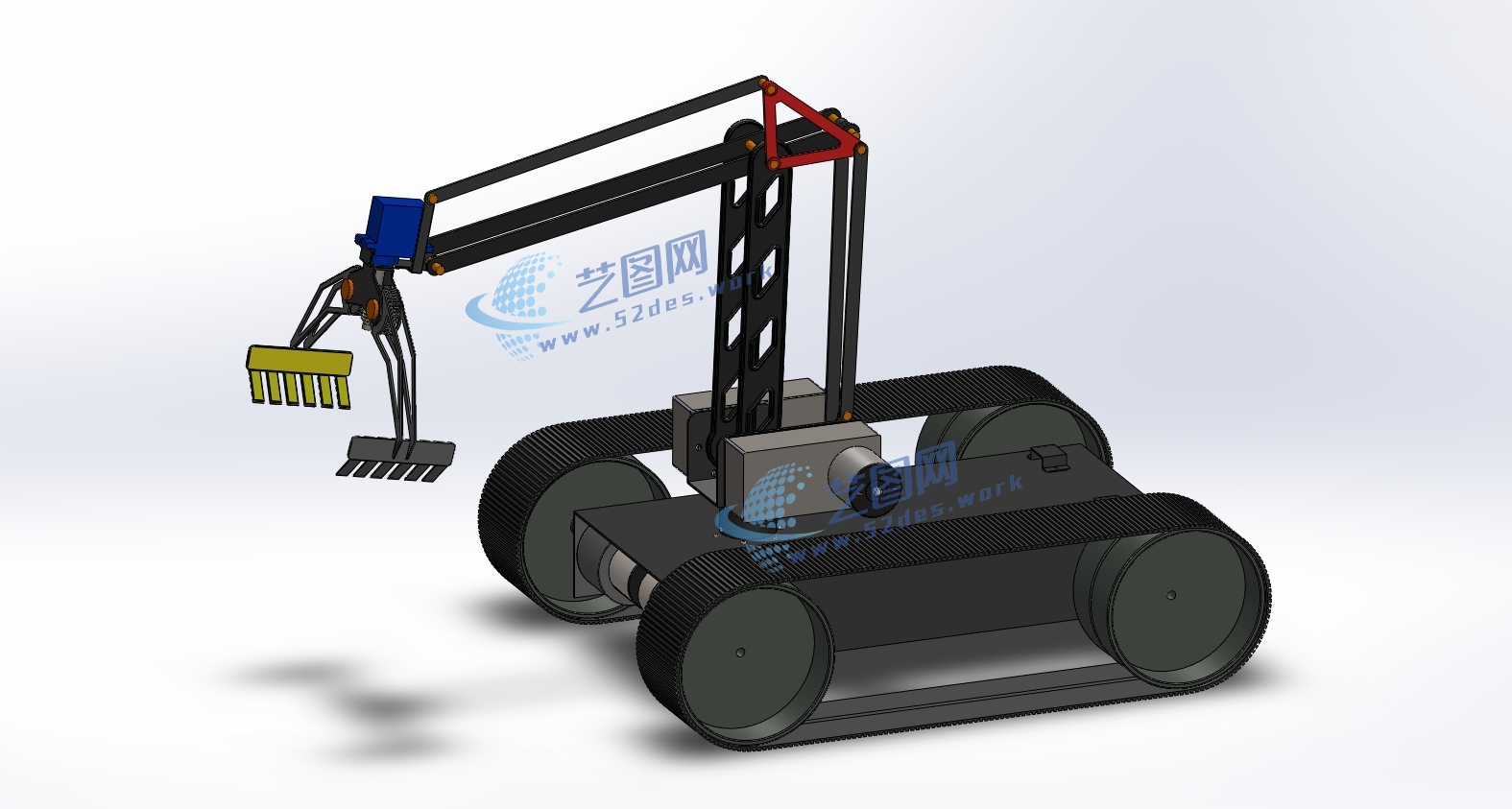 履带行走机器人solidworks20版本三维装配模型
履带行走机器人solidworks20版本三维装配模型 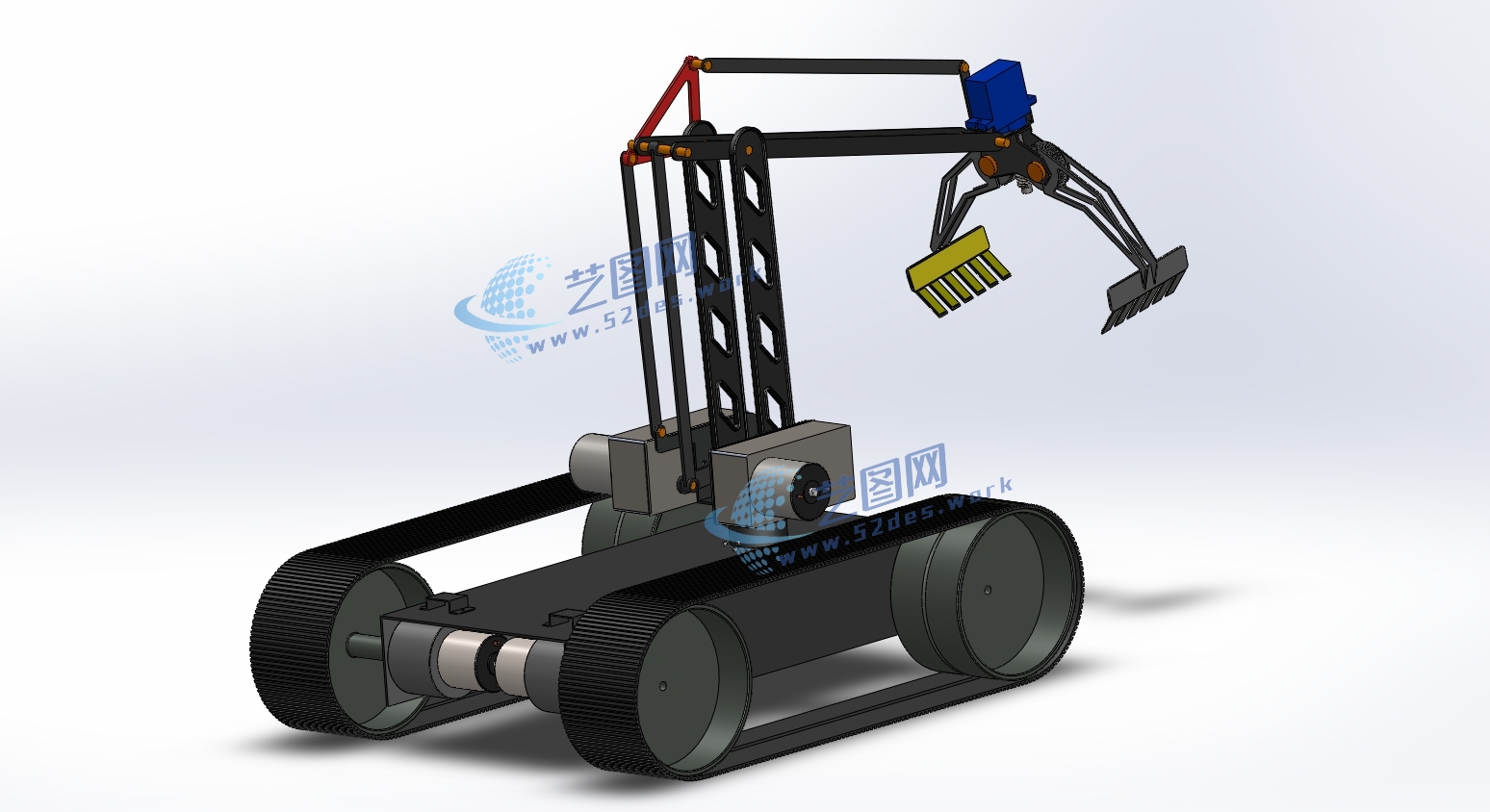 履带行走机器人solidworks20版本三维装配模型
履带行走机器人solidworks20版本三维装配模型  履带行走机器人solidworks20版本三维装配模型
履带行走机器人solidworks20版本三维装配模型 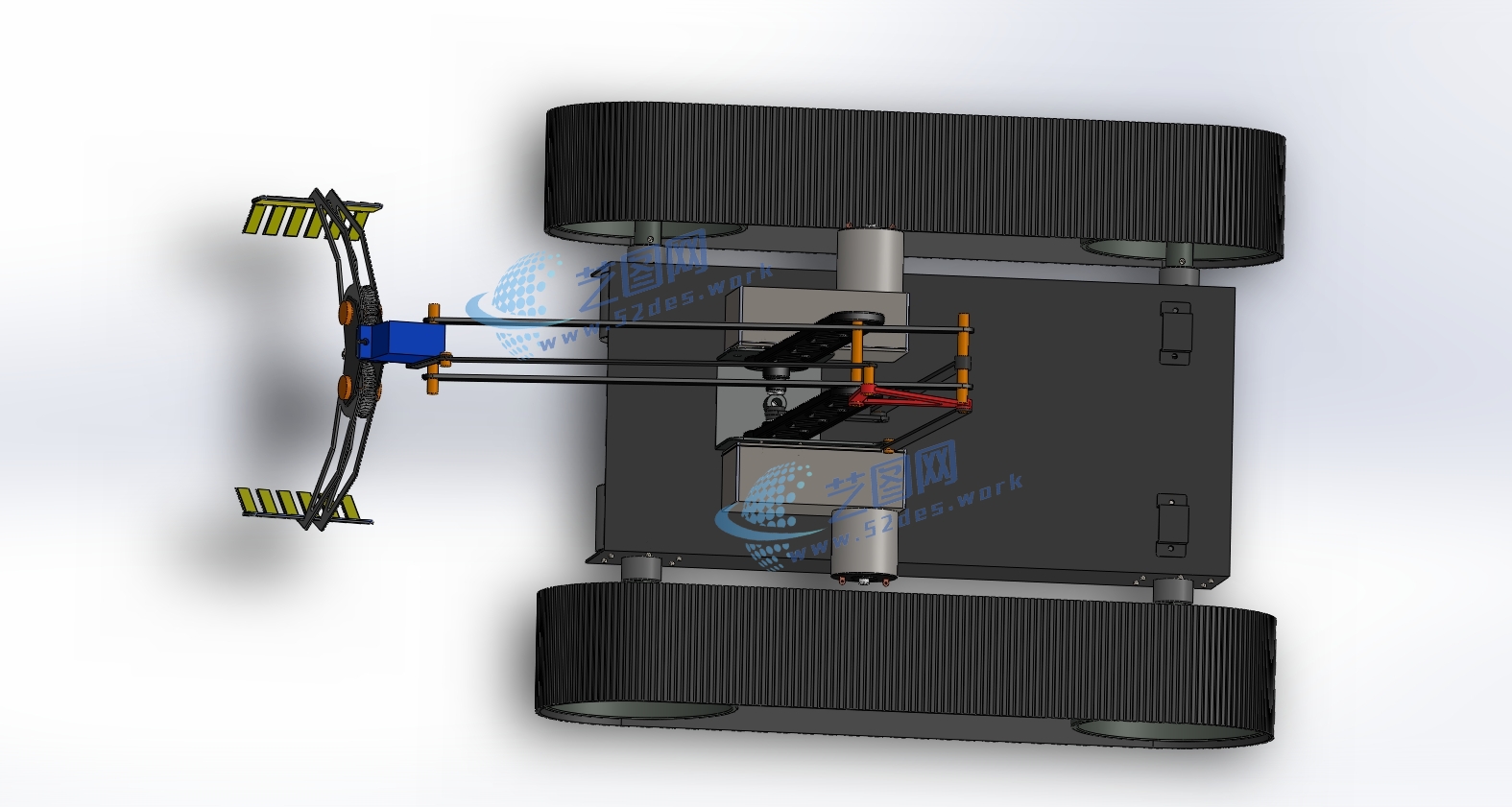
履带行走机器人的结构设计包括一个坚固的底座,上面配置了履带系统、电动驱动机构、控制单元、传感器装置和工作装置。履带系统由多个连接的履带构成,用于提供机器人的行走和移动能力,能够适应各种地形。电动驱动机构提供动力,以驱动履带系统的转动和机器人的行走。控制单元协调电动机的操作,实现精确的运动控制。传感器装置包括摄像头、激光雷达等,用于感知周围环境,实时获取信息。工作装置可以是各种不同的附加设备,如机械臂、摄像头、传感器等,用于机器人的具体任务和操作。这一结构设计旨在提供高度灵活和多功能的行走机器人,适用于各种应用领域,如探测、勘测、搬运和施工,以提高操作效率和适应性。

