
 爬楼机器人solidworks18版本模型源文件
爬楼机器人solidworks18版本模型源文件 爬楼机器人solidworks18版本、三维模型零件预览图
爬楼机器人solidworks18版本、三维模型零件预览图 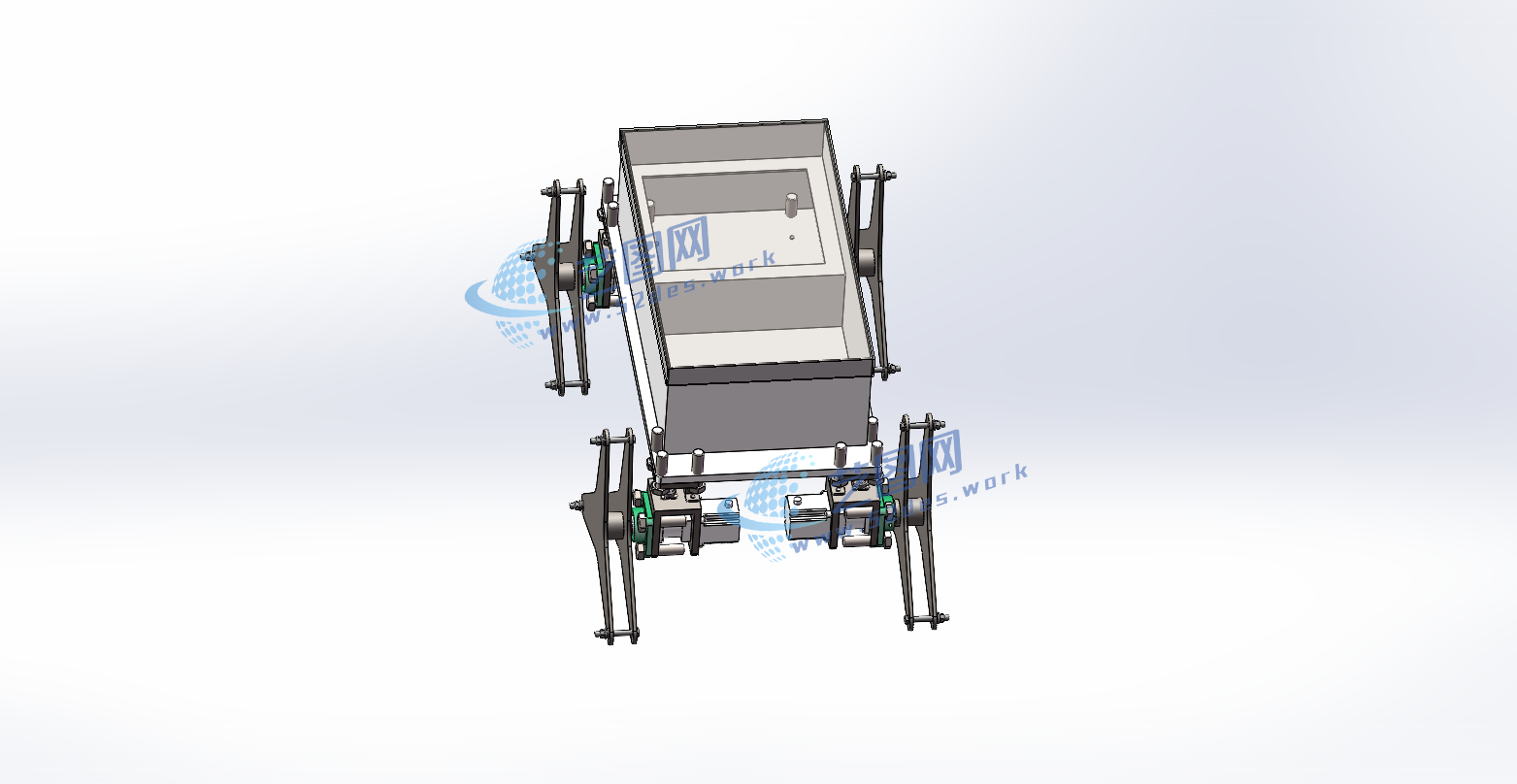 爬楼机器人solidworks18版本三维装配模型
爬楼机器人solidworks18版本三维装配模型 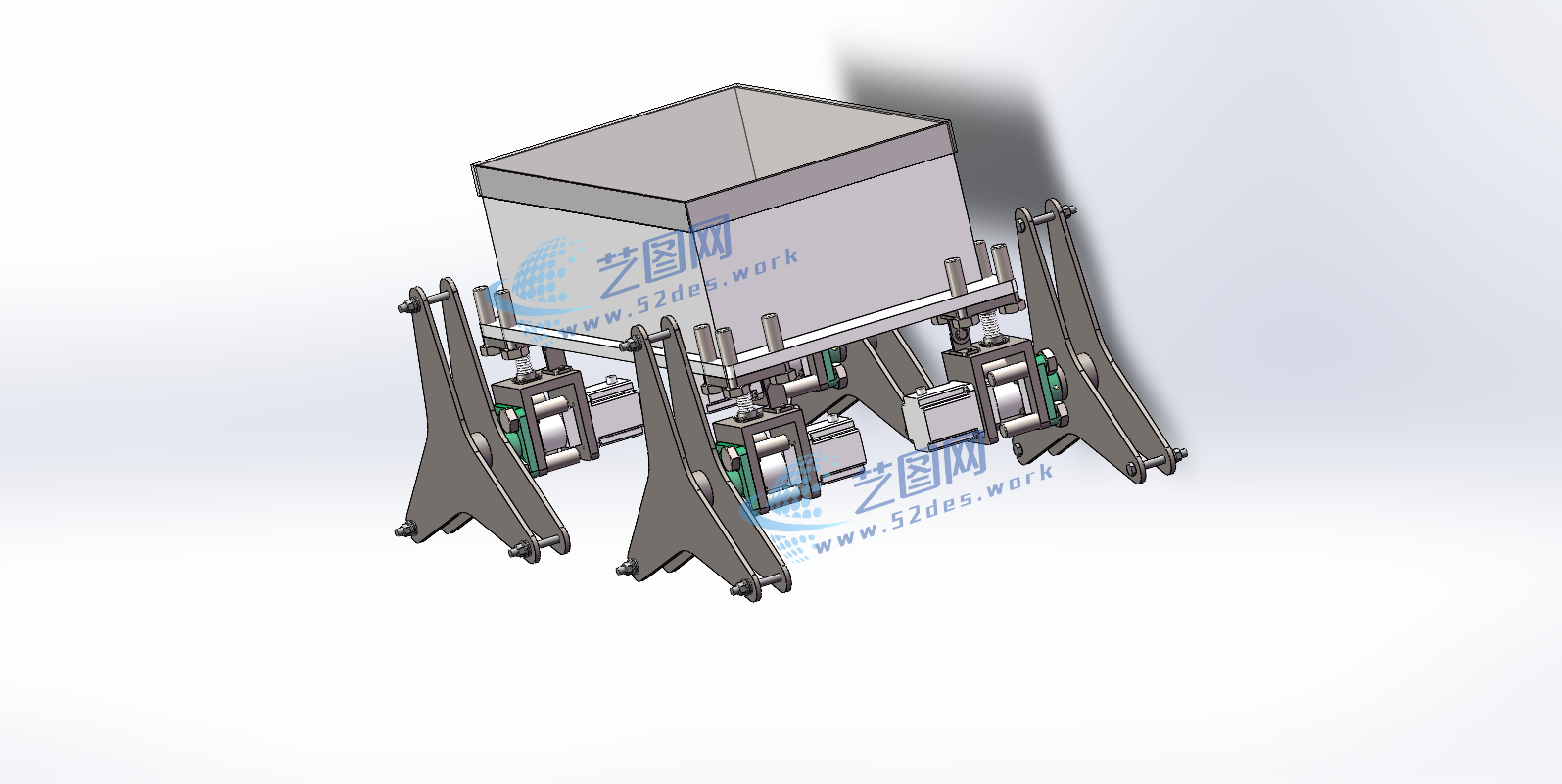 爬楼机器人solidworks18版本三维装配模型
爬楼机器人solidworks18版本三维装配模型 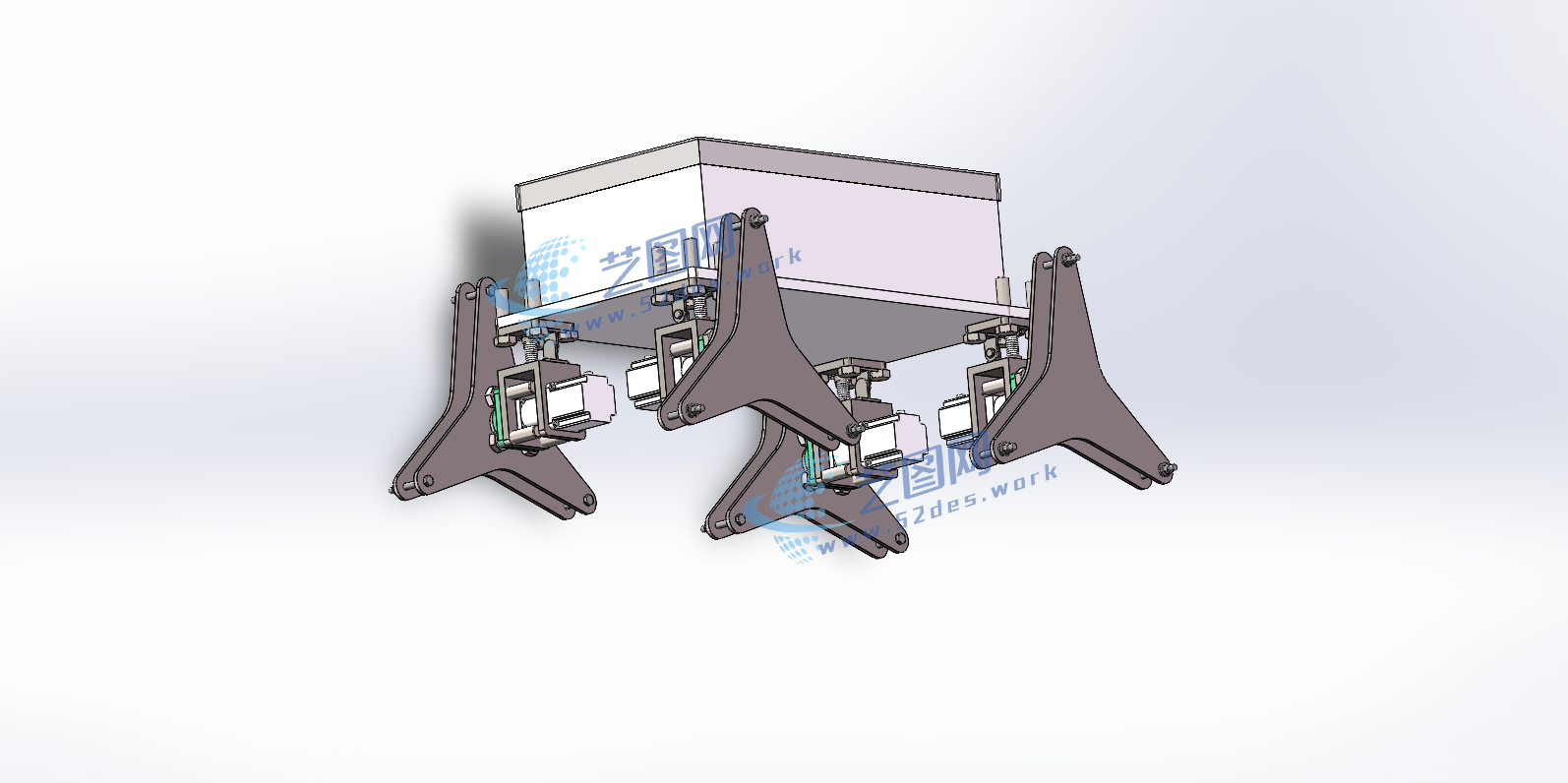 爬楼机器人solidworks18版本三维装配模型
爬楼机器人solidworks18版本三维装配模型 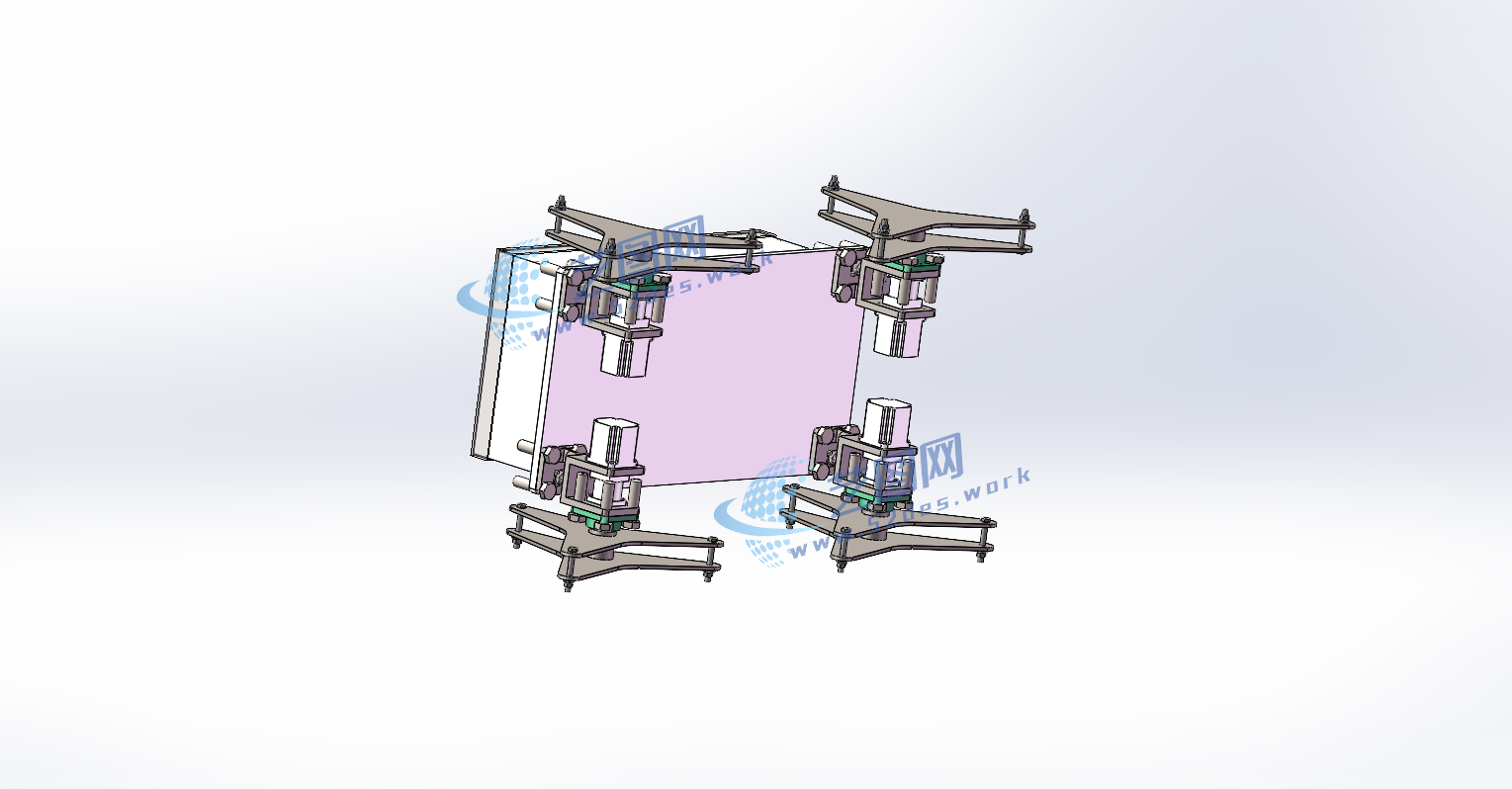 爬楼机器人solidworks18版本三维装配模型
爬楼机器人solidworks18版本三维装配模型 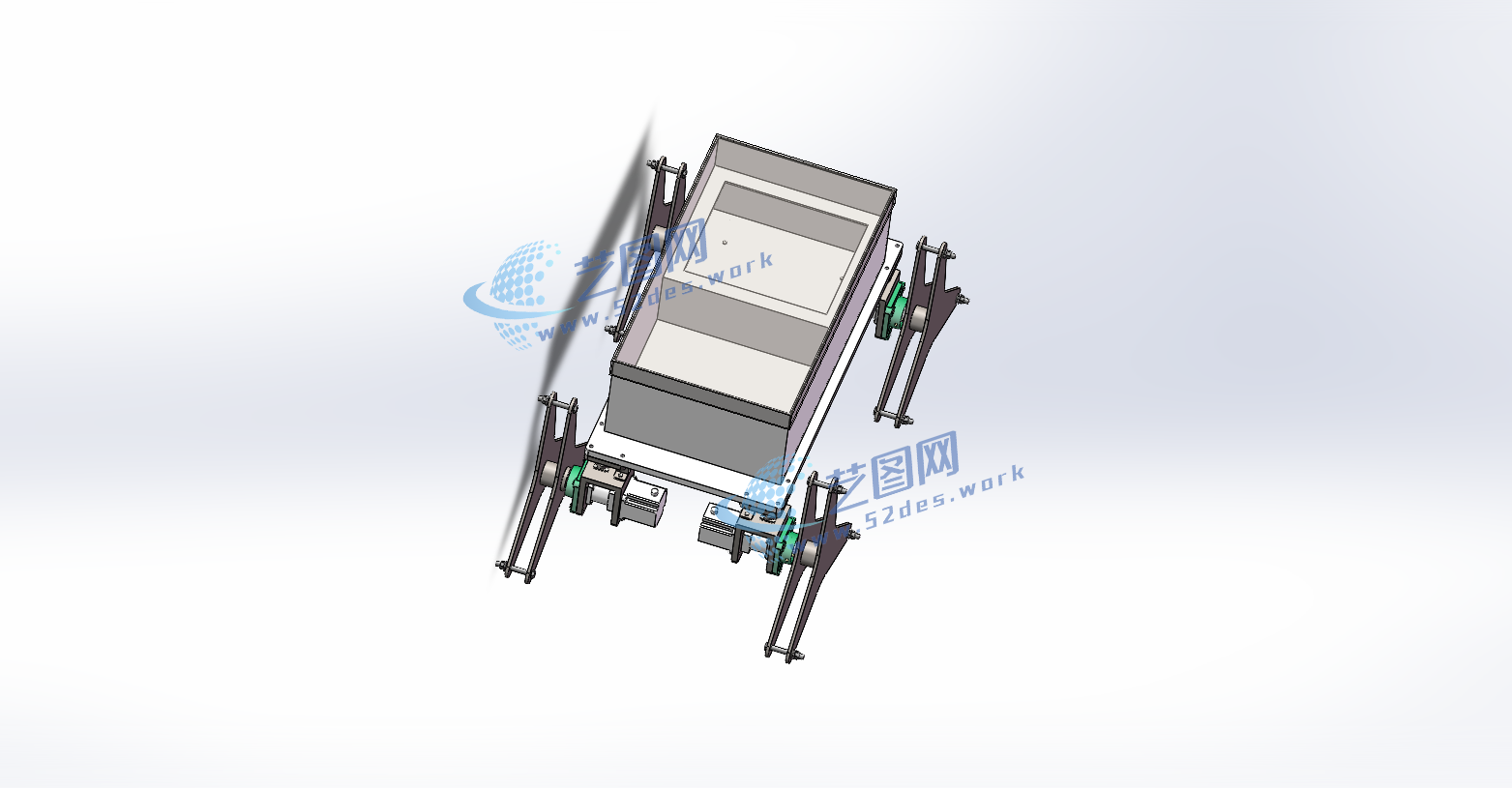
爬楼机器人设计旨在实现高层建筑外墙维护和检修的高效、安全作业。机器人配备可调节的爬升装置,能够适应不同楼层的高度。先进的传感技术和自主导航系统确保机器人在爬升过程中能够准确感知周围环境,避免障碍物。机械臂系统搭载各种工具,可执行清洁、维修和检测任务。这一设计广泛应用于城市高楼大厦的维护领域,提高了工作效率,降低了安全风险,为建筑保养提供了智能、可靠的解决方案。
声明:本站所有文章,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。
