
 文件内容:solidworks21版三维模型、CAD图纸、设计说明书
文件内容:solidworks21版三维模型、CAD图纸、设计说明书  码垛机器人solidworks21版本模型源文件,可编辑,含参数
码垛机器人solidworks21版本模型源文件,可编辑,含参数 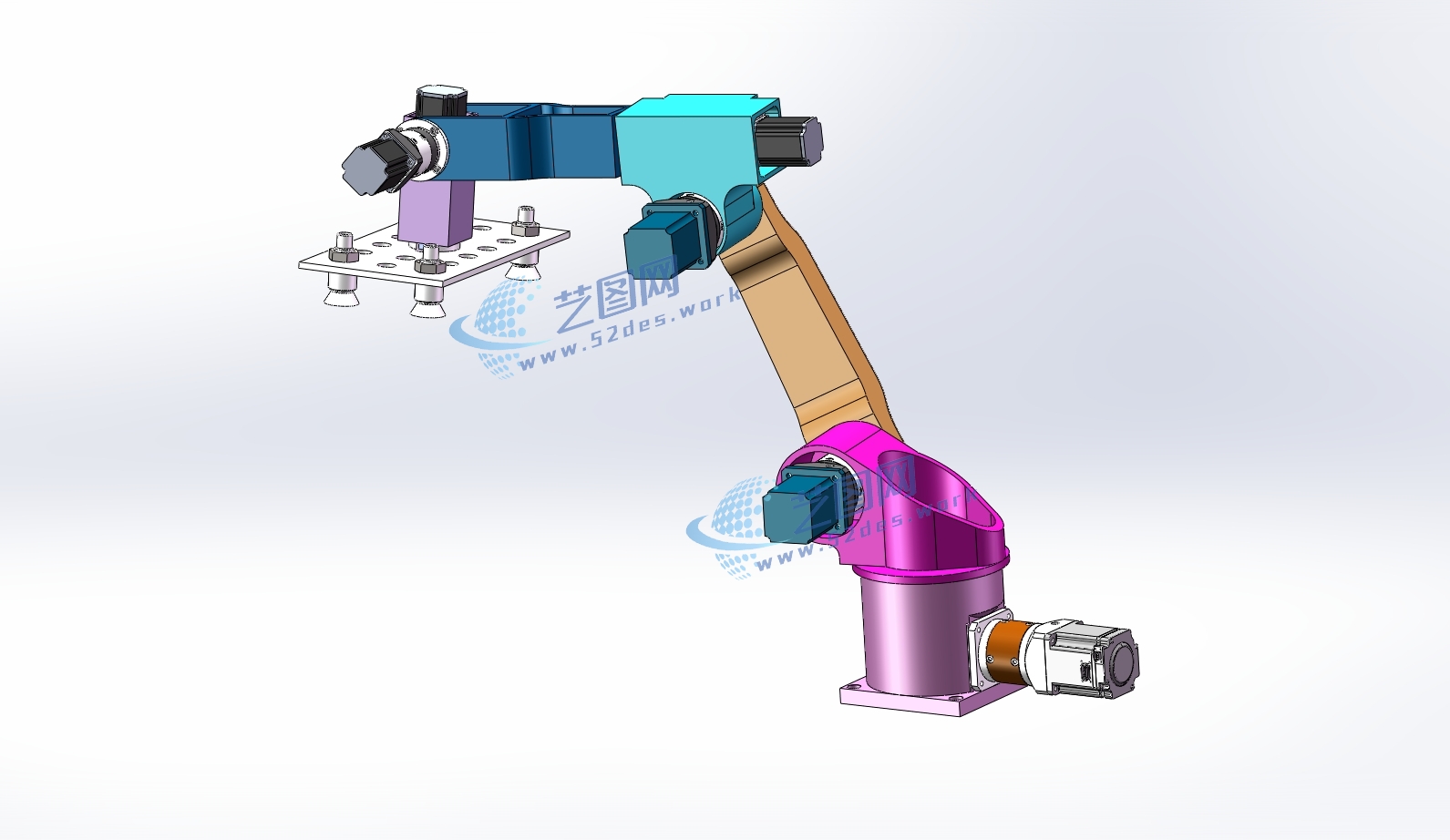 码垛机器人solidworks21版本三维装配模型
码垛机器人solidworks21版本三维装配模型 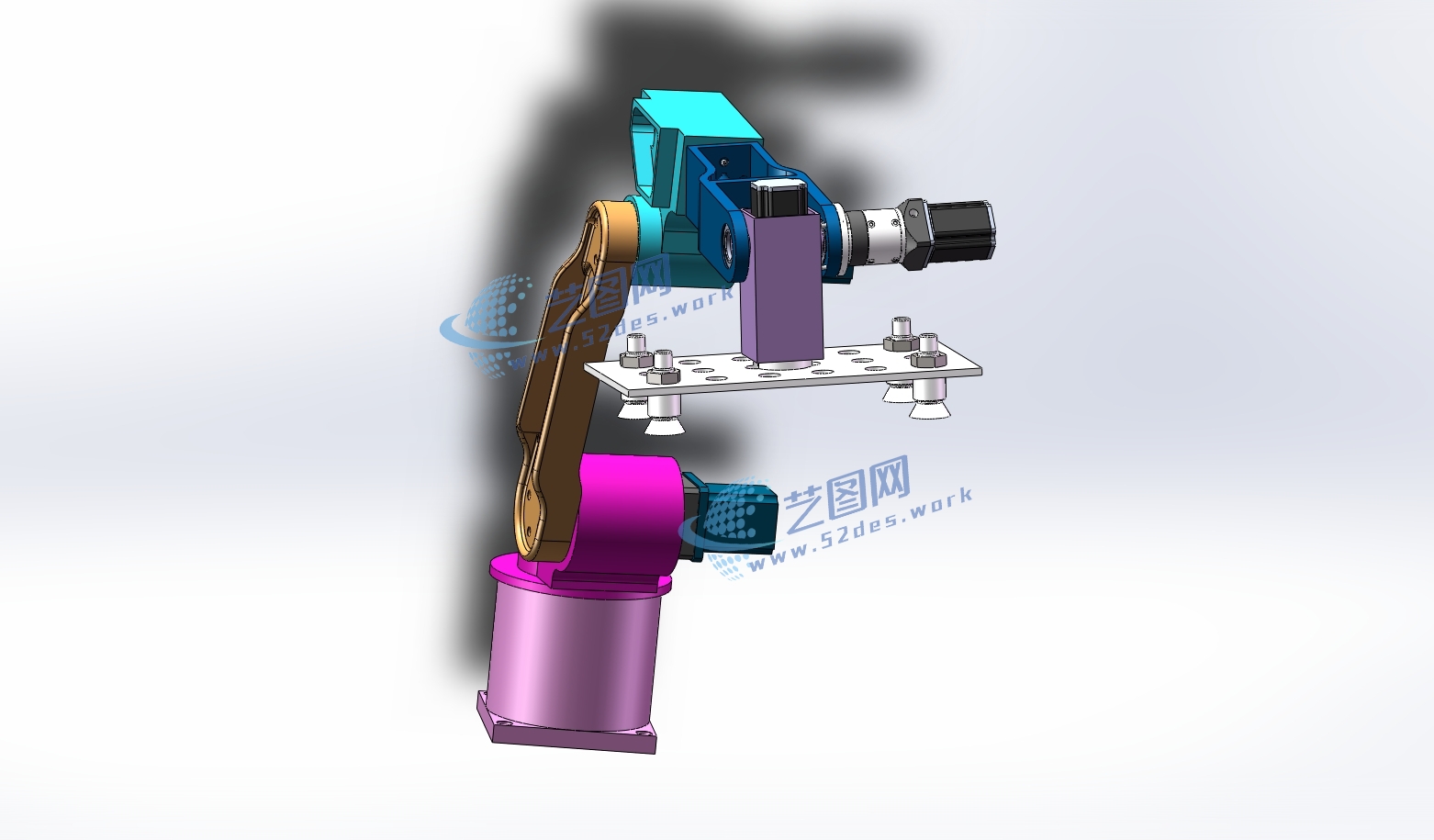 码垛机器人solidworks21版本三维装配模型
码垛机器人solidworks21版本三维装配模型 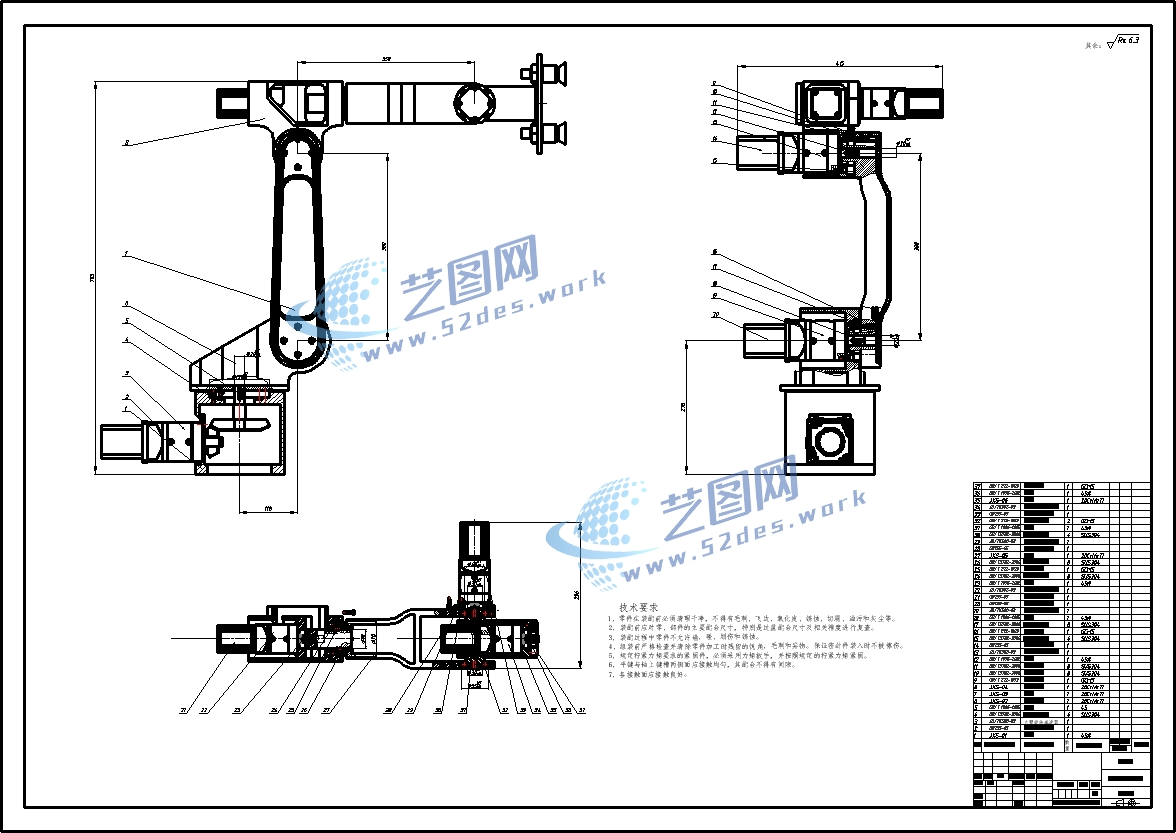 新国标CAD图纸:机械结构设计装配图
新国标CAD图纸:机械结构设计装配图  新国标CAD图纸:零件图
新国标CAD图纸:零件图 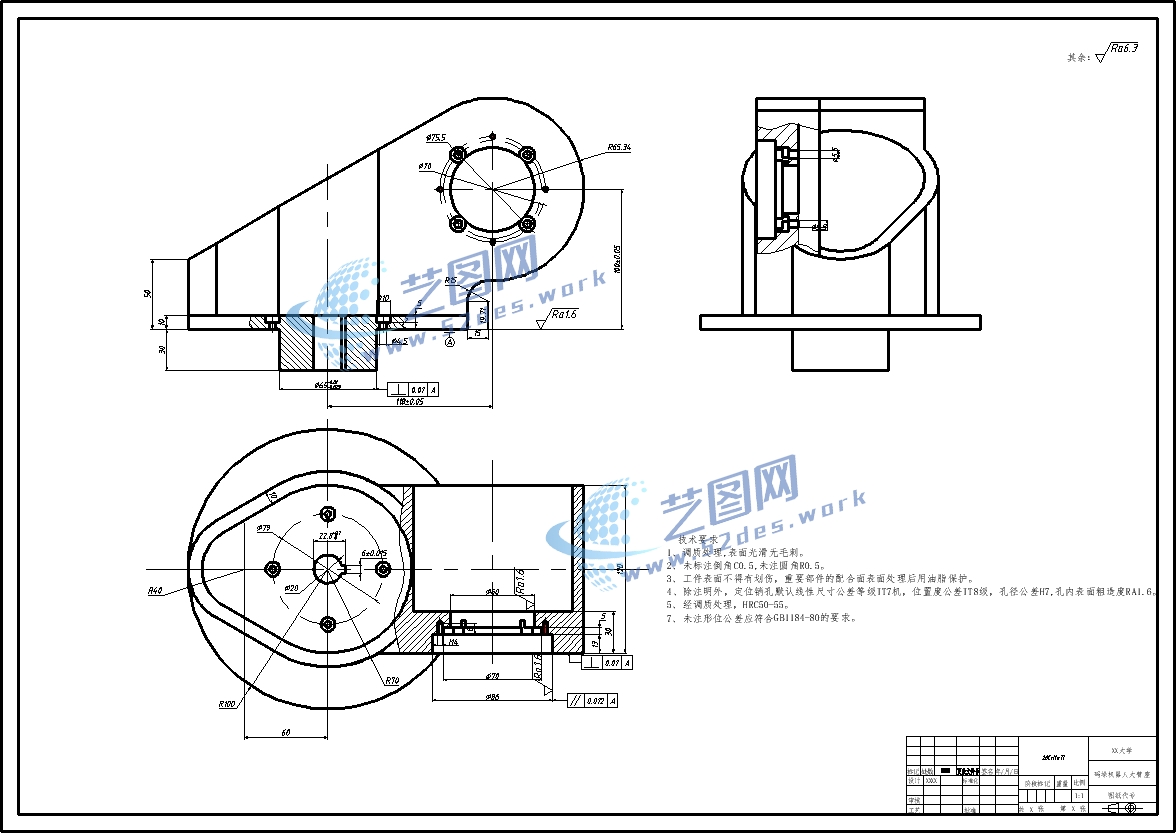 新国标CAD图纸:零件图
新国标CAD图纸:零件图 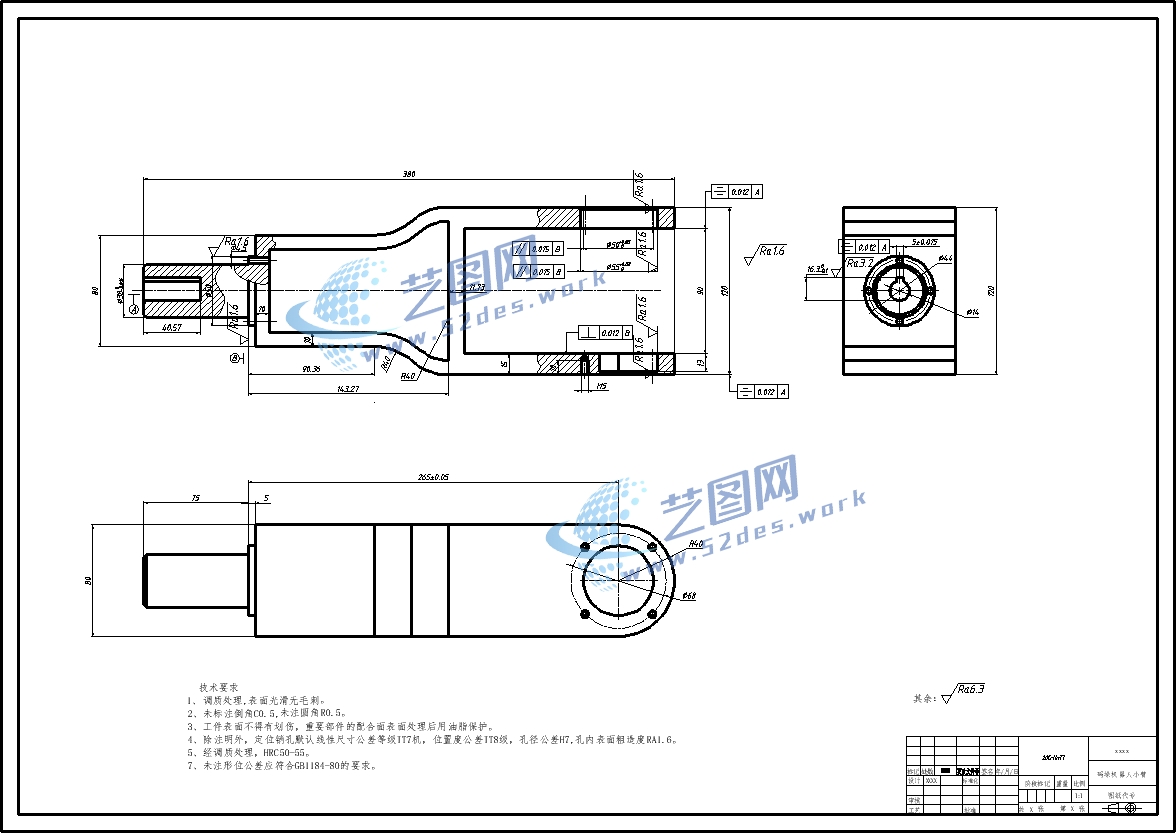 新国标CAD图纸:零件图
新国标CAD图纸:零件图 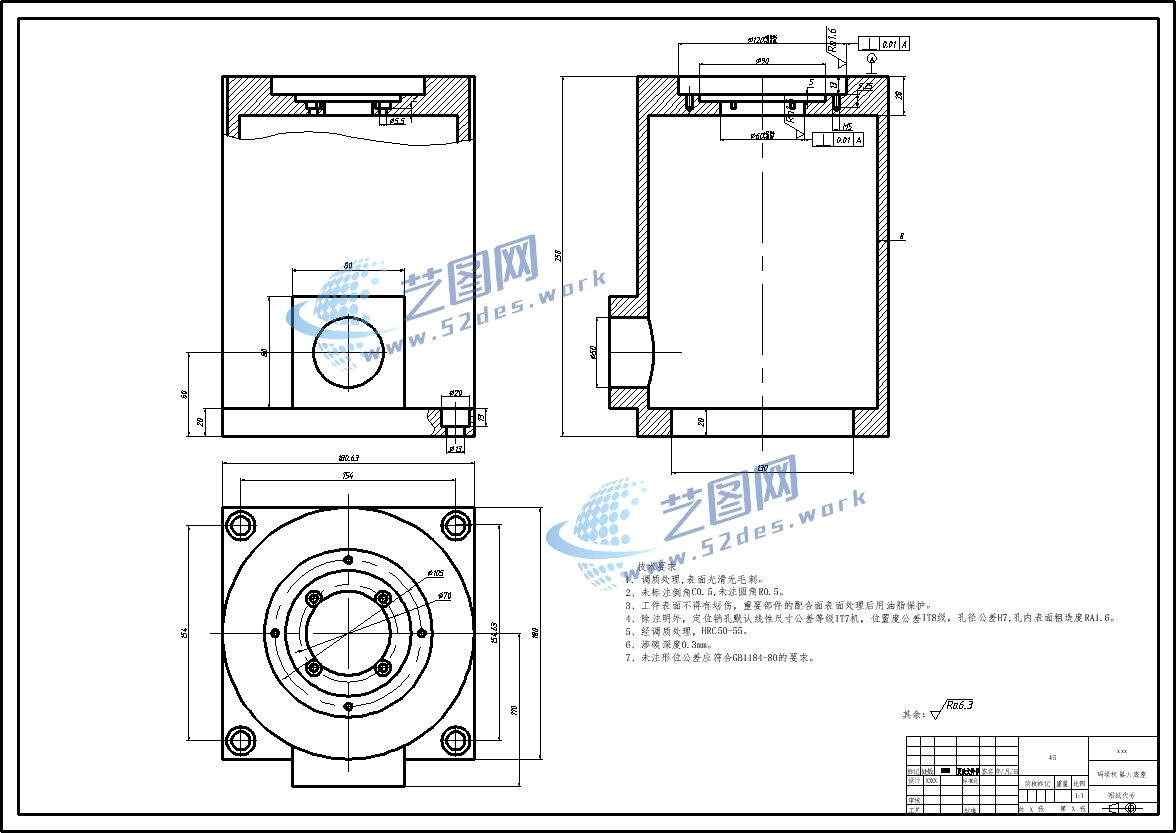 新国标CAD图纸:零件图
新国标CAD图纸:零件图 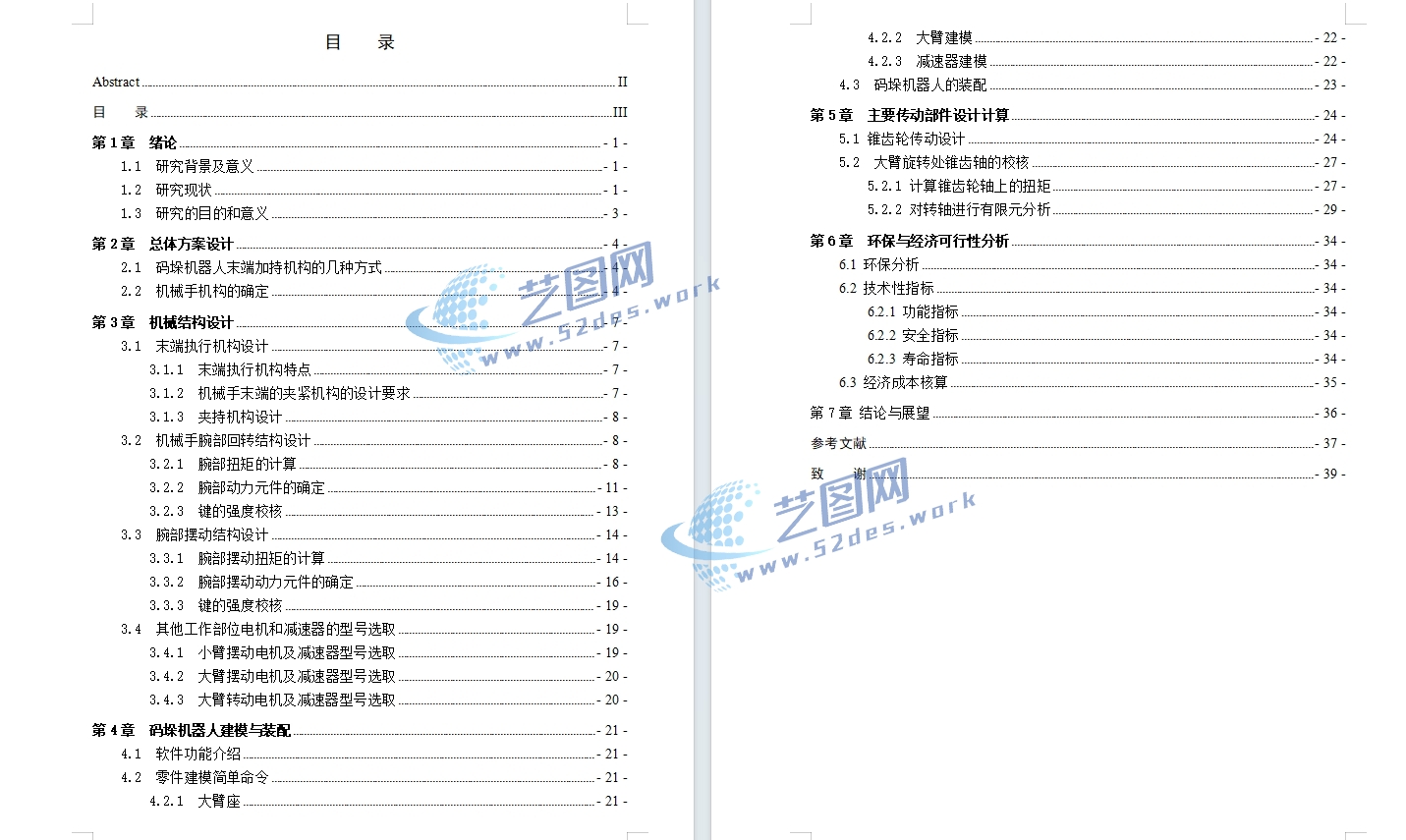 码垛机器人设计说明书目录
码垛机器人设计说明书目录 
此次设计的自动码垛机器人需要解决模块码垛困难问题,达到效率高、成本低、安全性高等目的。总结分析模块码垛时的动作,需要有价高的灵活性。为此此次设计的快递码垛机器人采用六自由度设计:腰部、小臂和腕部具有有一个旋转自由度,大臂、小臂和手腕的俯仰自由度。通过分析实际码垛情况来对其夹紧机构,确定夹紧机构采用负压吸盘机构。传动方式采用标准伺服电机配合减速器使用。完成对主要传动部件的设计计算,并采用三维软件进行零件建模和运动仿真模块进行分析。最终实现整体结构设计的合理性。
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。
