
 文件内容:UG三维模型、CAD图纸、设计说明书
文件内容:UG三维模型、CAD图纸、设计说明书  苹果采摘机器人UG模型源文件
苹果采摘机器人UG模型源文件 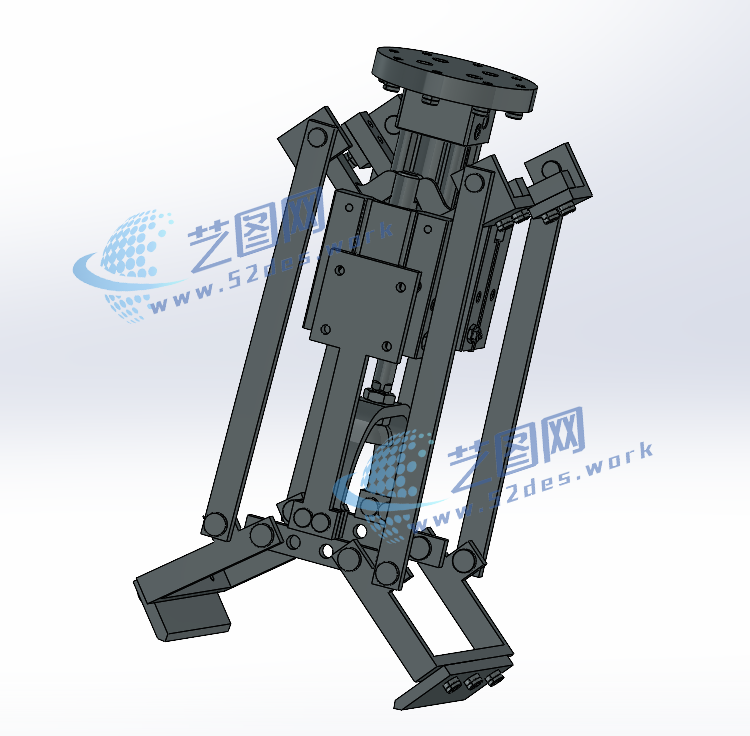 苹果采摘机器人UG三维装配模型
苹果采摘机器人UG三维装配模型 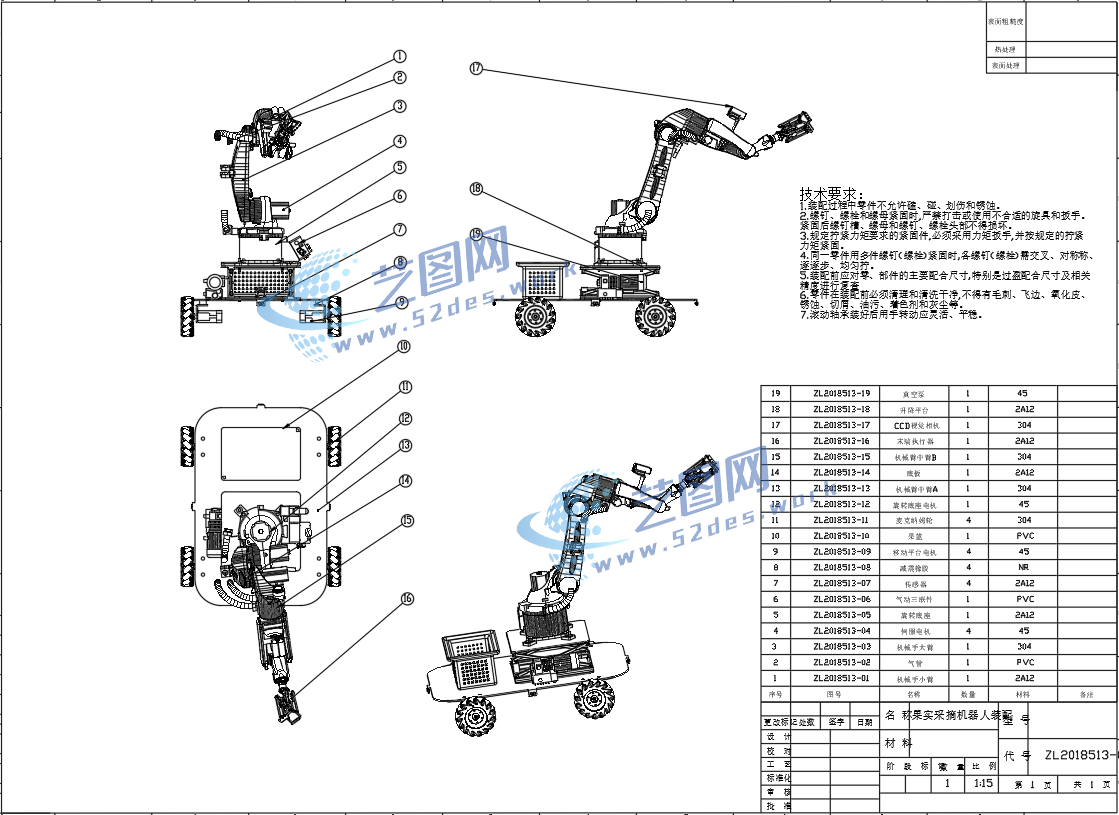 国标CAD图纸:机械结构设计装配图
国标CAD图纸:机械结构设计装配图  苹果采摘机器人设计说明书目录
苹果采摘机器人设计说明书目录 
中国是世界上最大的苹果生产国,产量占世界的56%,2016年,其年产量约为239万吨,种植面积超过67000公顷。苹果采摘是一项劳动密集型作业,占年生产成本的25%以上。因此,为了减少劳动力需求,机械化采摘技术正在发展,在这种背景下,对采摘机器的研究就显得尤为重要。然而,苹果生长环境复杂,果皮容易受损,使得机器很难自动为苹果采摘,在实现商业化之前,机器采摘还需要克服许多挑战。采摘有三个主要方面:寻找苹果,同时避免障碍物、采摘。目前,急需建立适应果园环境和苹果特性的机械结构,因此,需要经济、高效、适应性强的机器来降低机器的劳动需求采摘苹果根据中科院的调查,在过去的30年里,我国已经开发了50种采摘机器。对于其中一些机器,几乎所有的末端执行器都是定制的,末端执行器在自动化苹果采摘中起着关键作用,因此它们的设计尤为重要。对于其他苹果和蔬菜,末端执行器已经开发出来,利用机器识别与不同作物相关的环境差异的能力,如番茄、黄瓜,苹果,草莓,胡椒,樱桃番茄,不同的苹果和蔬菜具有不同的特征生长模式,因此使用末端效应器的相应采摘方法也不同。我设计一种高效实用的水果采摘机。本设计的主要内容如下:对采摘苹果的机器人总体方案的设计,通过方案对比与选用原则,最终确定为六自由度串联关节型苹果采摘机械手。对执行末端的设计,末端执行机构是一种蛇头四杆机构咬合苹果,然后半球式刀片固定果实和切割果枝,包括对四杆机构远动分析,力的计算和半球刀片齿轮载荷进行计算。对采摘苹果的机械手臂运动学分析,建立运动学方程求解验证以及零件理论分析。对执行末端进行有限元分析,确保采摘苹果过程稳定安全。
