
 45°麦克纳姆轮solidworks16版本模型源文件
45°麦克纳姆轮solidworks16版本模型源文件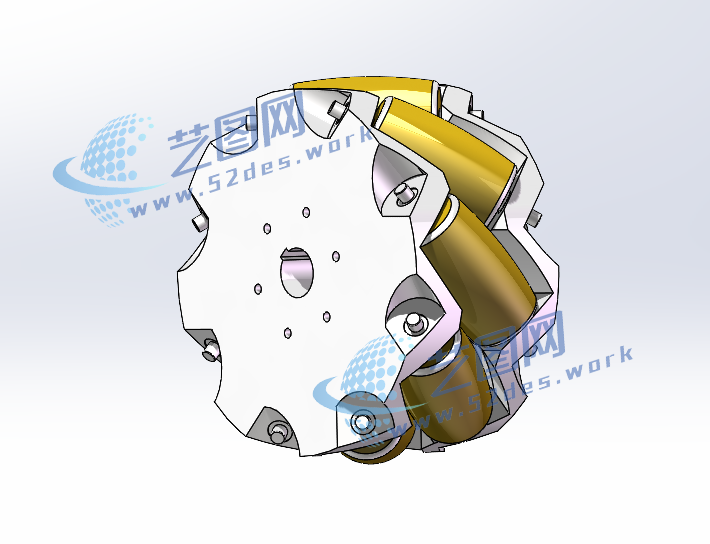 45°麦克纳姆轮solidworks16版本三维装配模型
45°麦克纳姆轮solidworks16版本三维装配模型 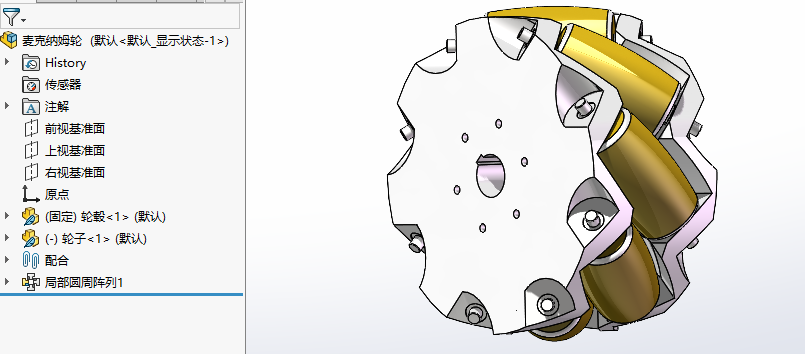 45°麦克纳姆轮solidworks16版本三维装配模型
45°麦克纳姆轮solidworks16版本三维装配模型 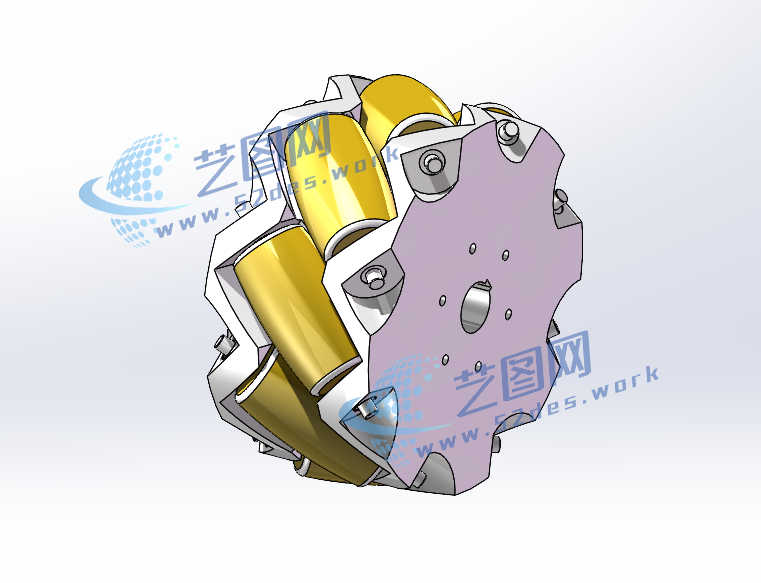
45°麦克纳姆轮设计旨在提高机器人机动性。采用创新的45°排列方式,使机器人在水平和垂直方向上都能实现平滑的推进和旋转,最大程度地增强了机动性和精准操控性。轮辐结构精致轻巧,减少摩擦阻力,提高效率。由于麦克纳姆轮的独特设计,机器人可以在狭小空间内自由移动,完成复杂任务。整体设计考虑了稳定性和可靠性,为机器人在多样化环境中的灵活运动提供了可靠支持。
声明:本站所有文章,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。
