

文件内容:solidworks21三维模型、CAD图纸、设计说明书 
直角坐标机械手solidworks21版本模型源文件,可编辑,含参数
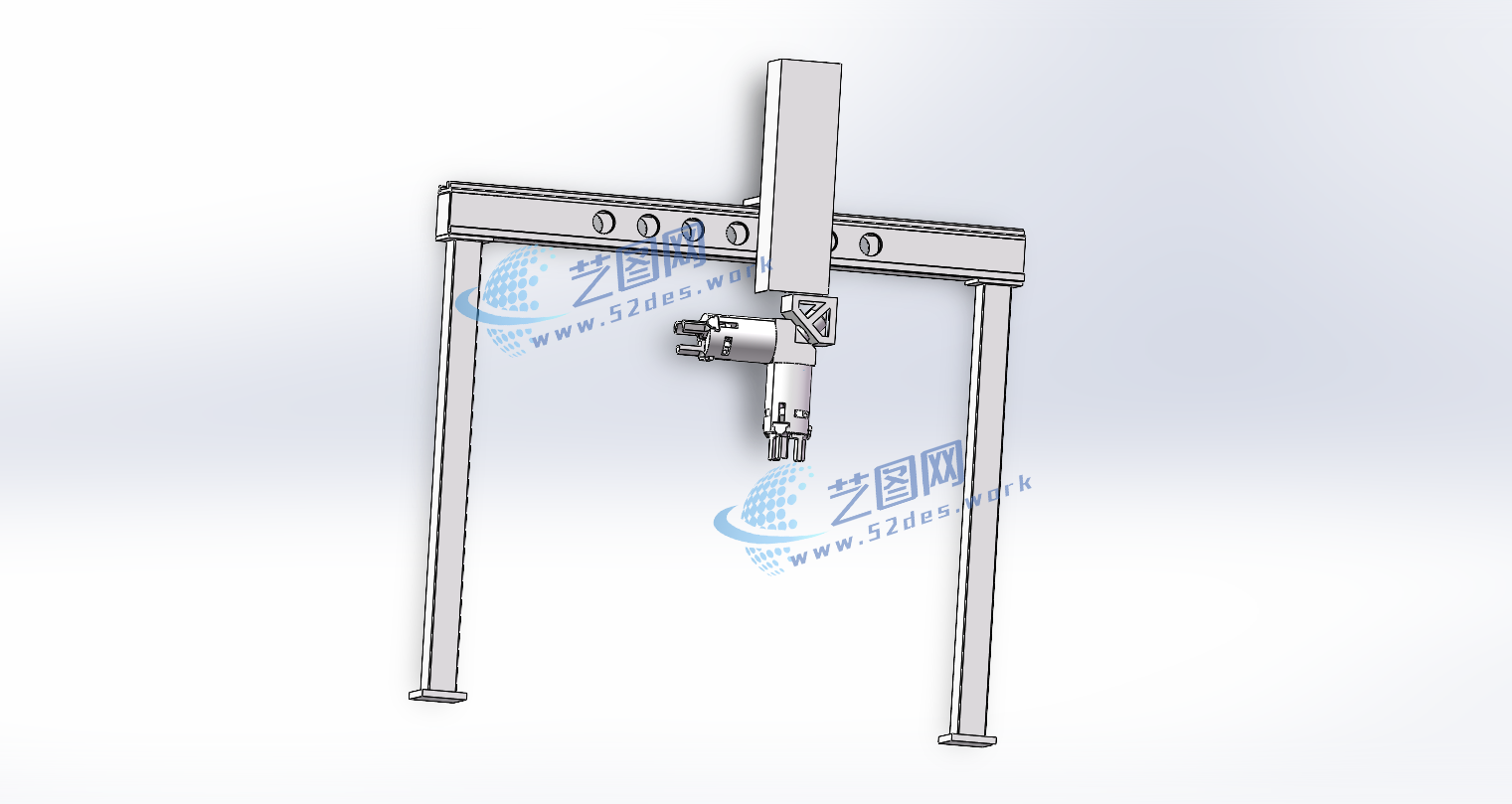
直角坐标机械手solidworks21版本三维装配模型
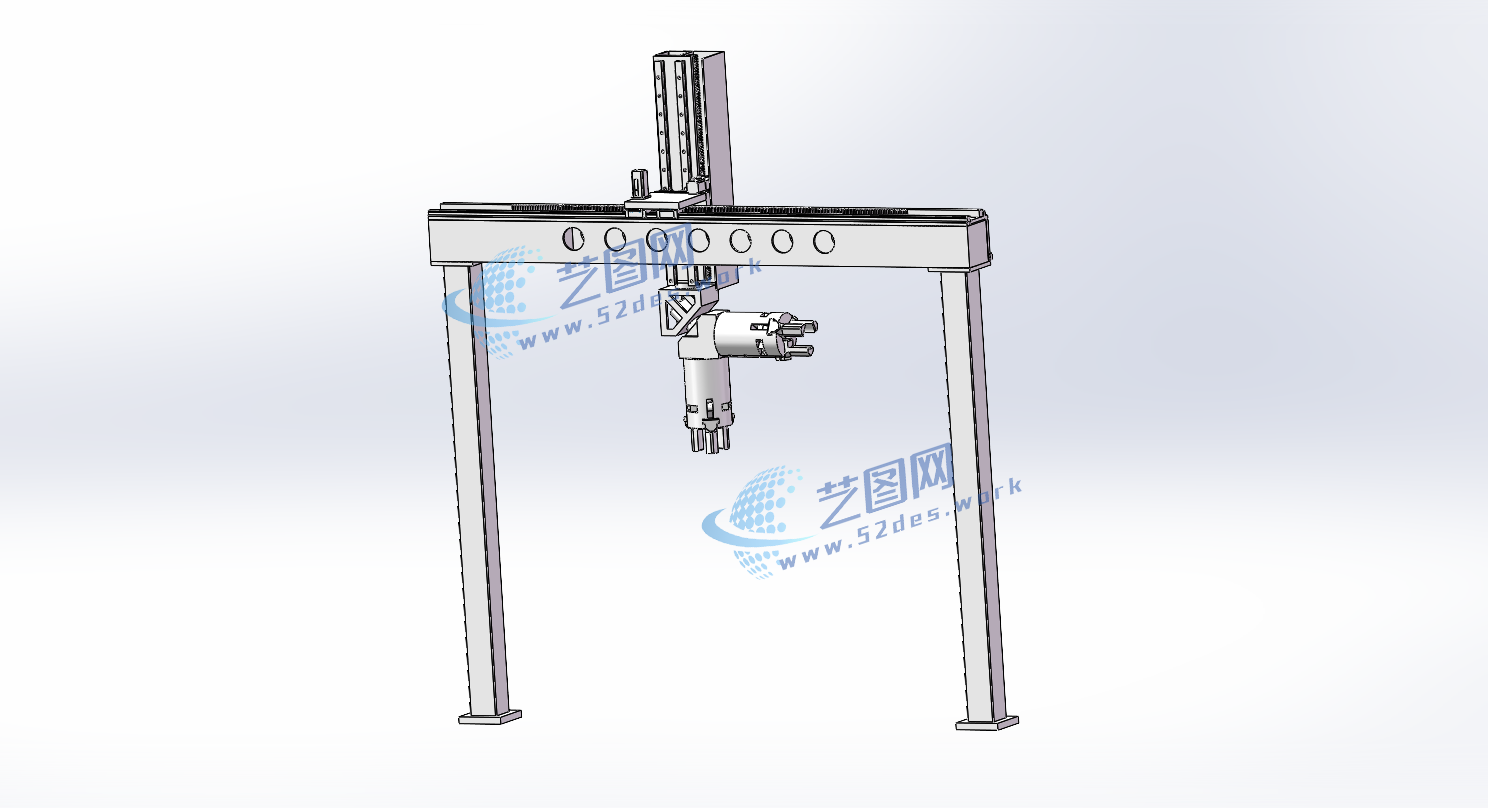
直角坐标机械手solidworks21版本三维装配模型
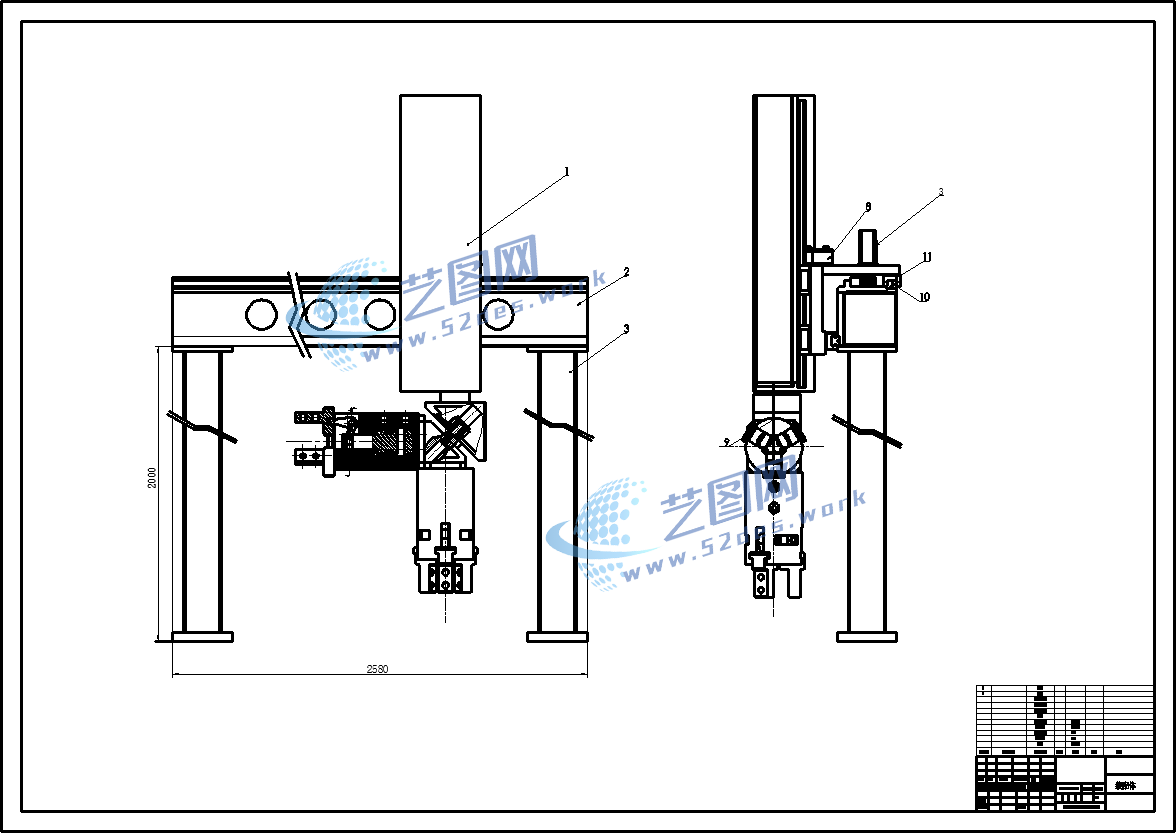
机械CAD装配图,整体结构两轴式结构设计能够实现物体的抓取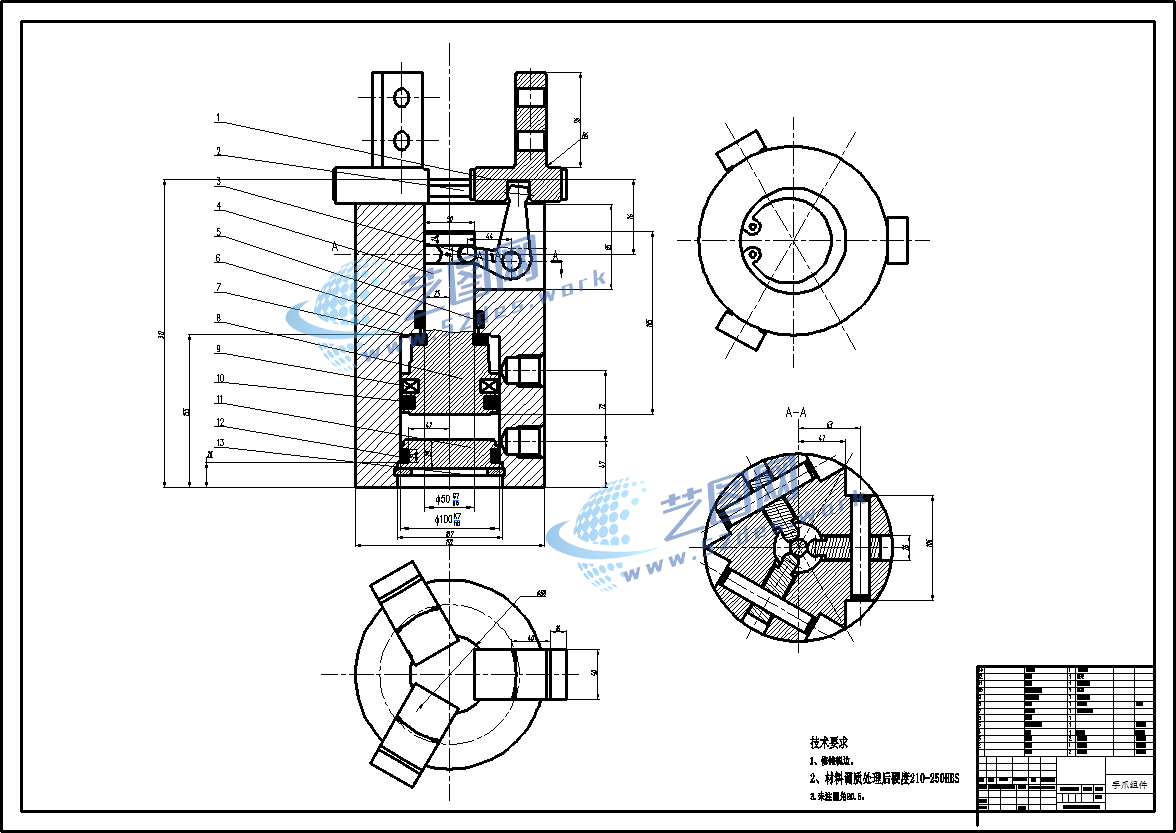
新国标CAD图纸:零件图
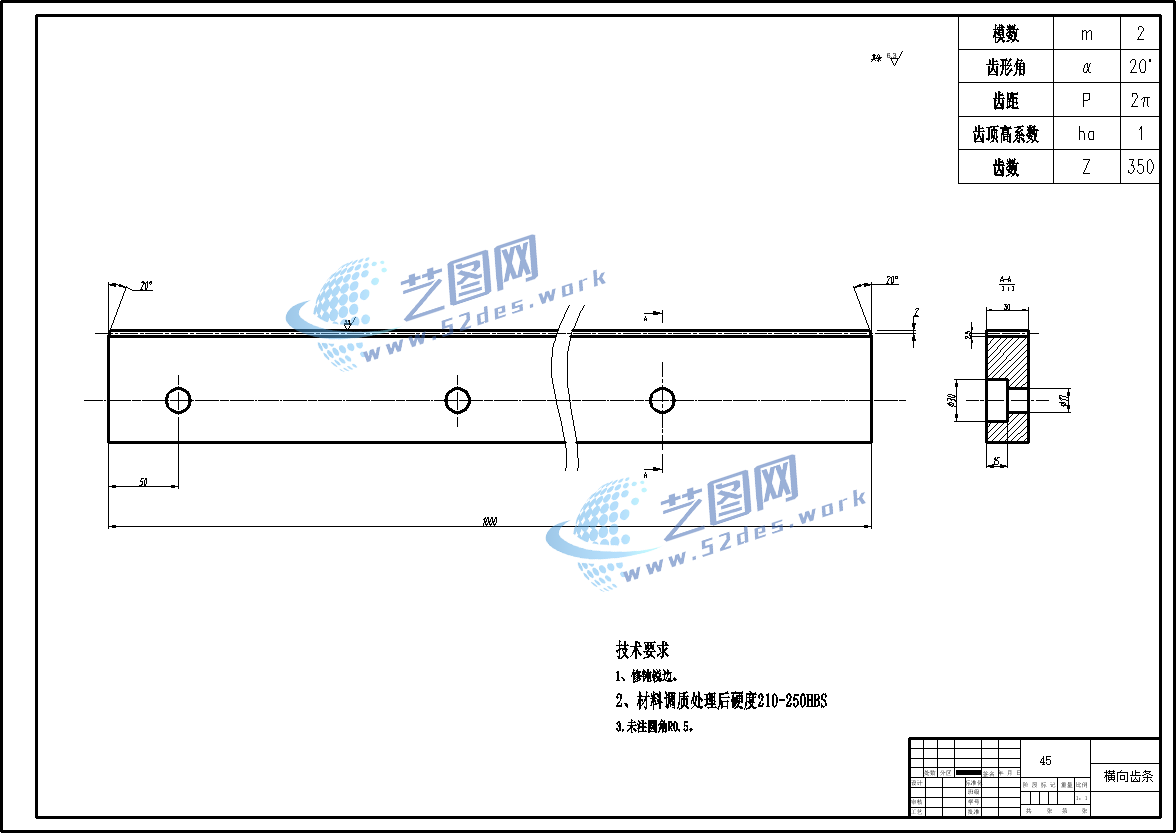
新国标CAD图纸:零件图
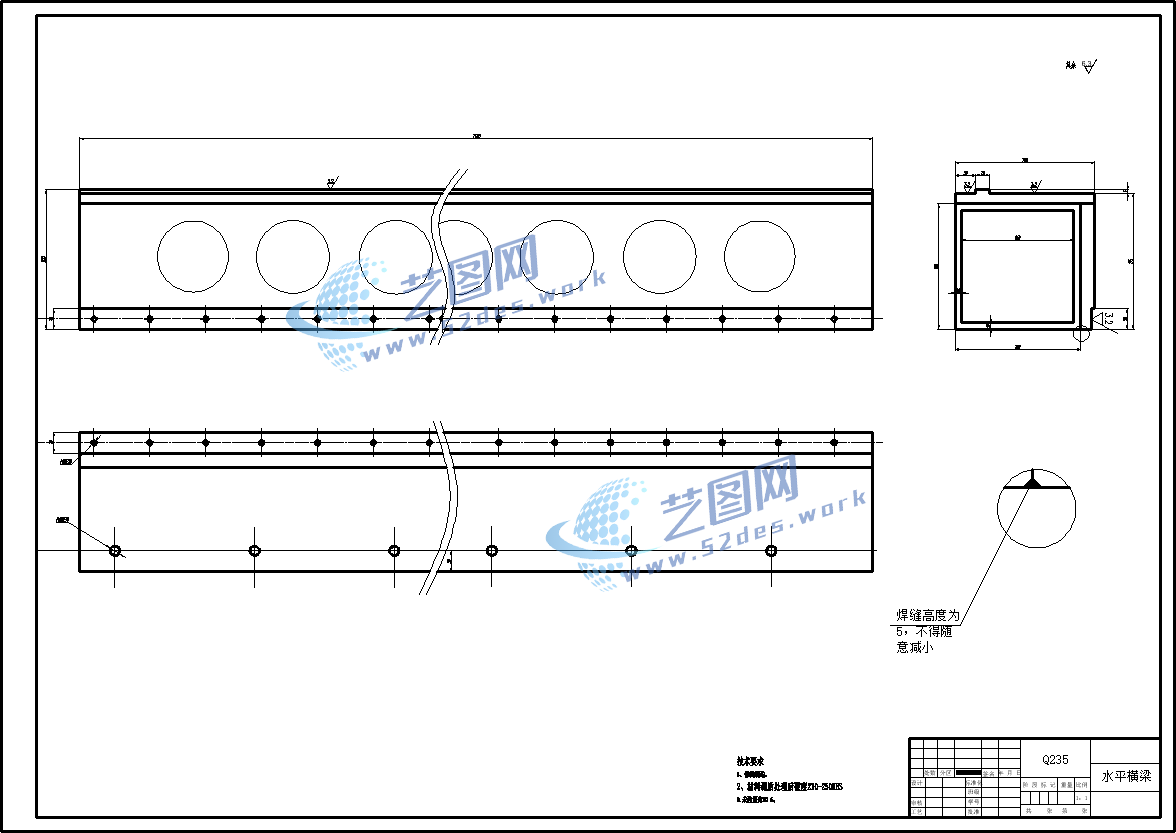
新国标CAD图纸:零件图
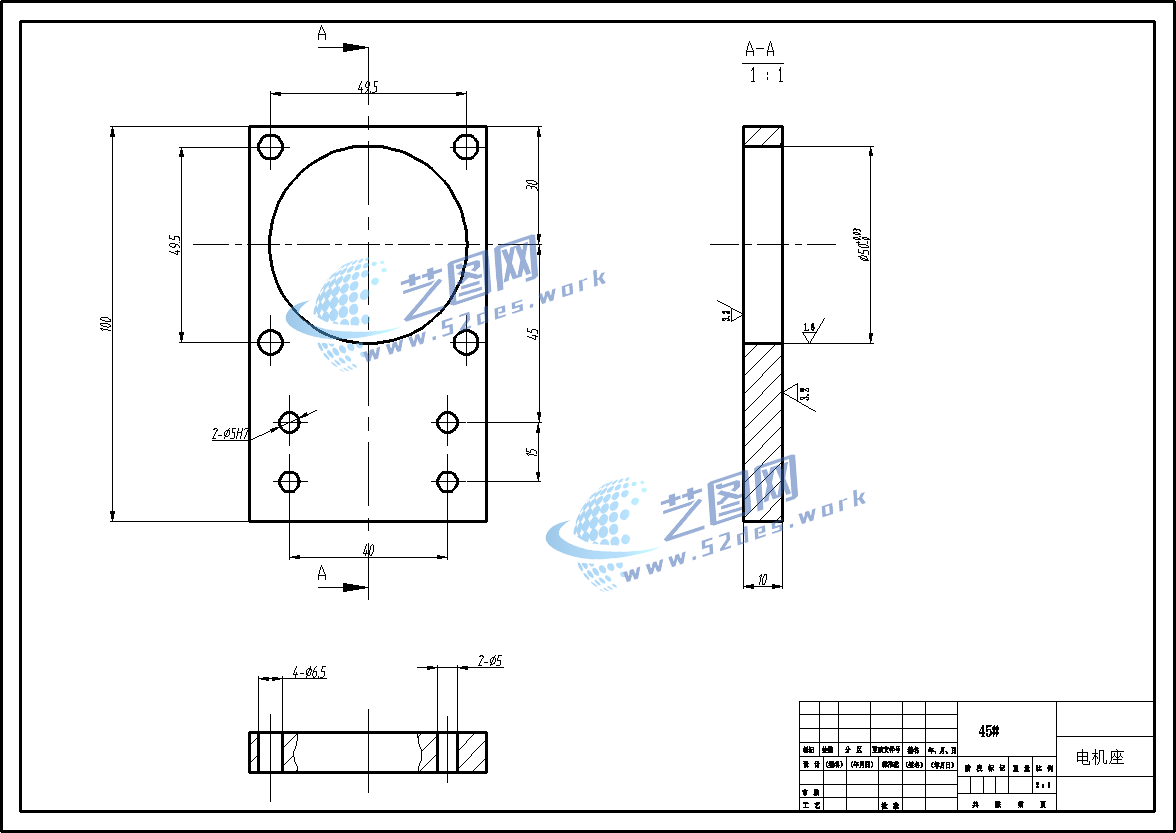
新国标CAD图纸:零件图
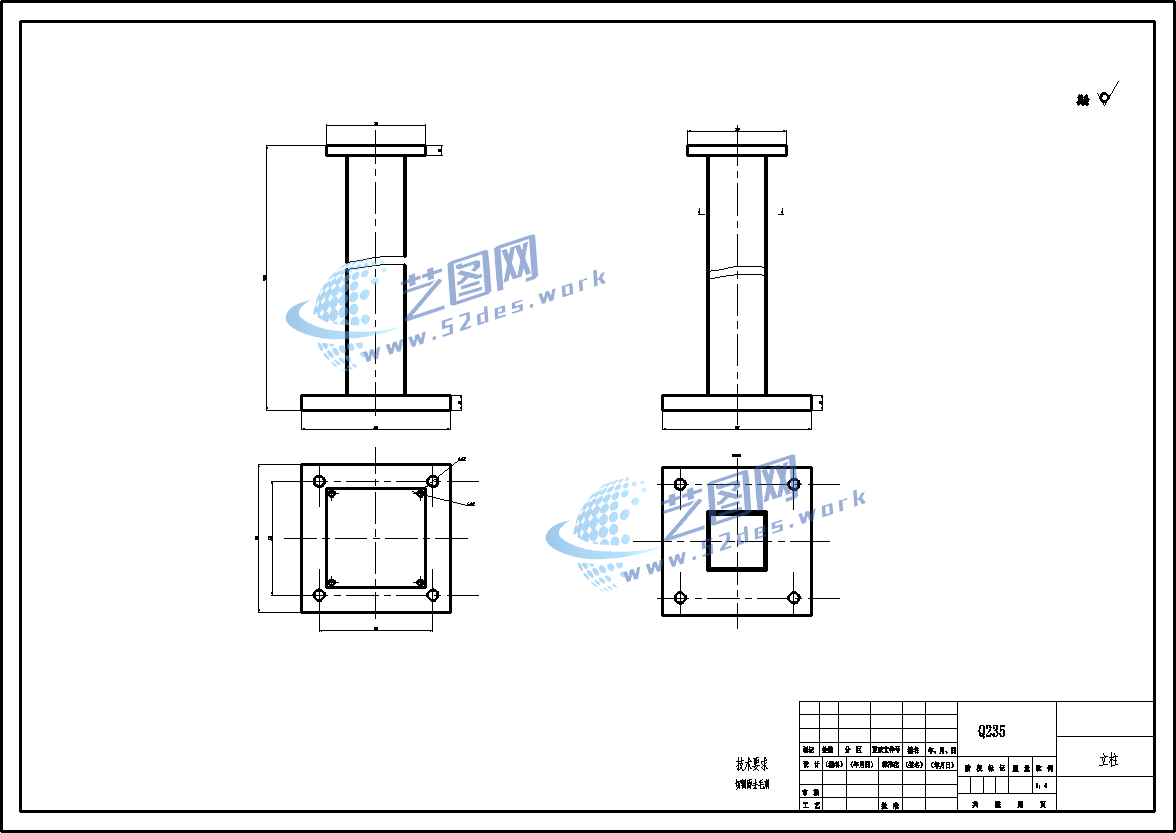
新国标CAD图纸:零件图
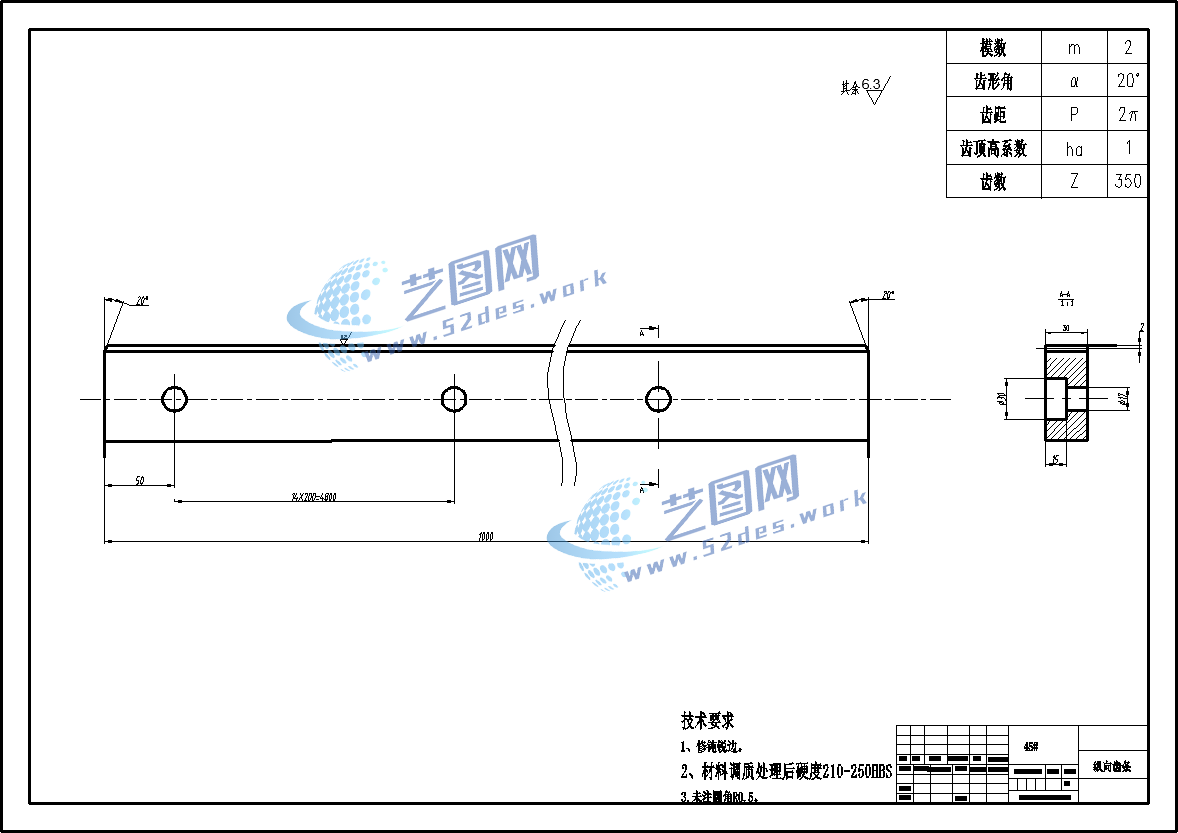
新国标CAD图纸:零件图
直角坐标机械手设计说明书目录
本课题设计的直角坐标型码垛搬运机属于直角坐标机械手,可以满足在X、Z坐标上的移动要求,以及对工件的安全抓取和释放,将码垛输送带上的产品搬运到指定位置。其结构简单,易于编程控制,可有效提高产品的码垛效率,降低码垛成本。应对其结构设计对龙门架直线导轨滑块受力情况对其动载荷进行计算,为直线导轨的选型提供依据,在机械手受最大载荷的情况下对驱动进行选型和夹取长度进行初步的计算和材料的选取。其次,对直角坐标型码垛搬运机的关键部位进行静力学分析,确定是否满足载荷要求,对物流运输效率和工作质量有一定的提高。本设计主要通过查阅相关资料文献,合理设计机械手的结构以及对机械手的主要零部件进行计算和校核计算。
声明:本站所有文章,如无特殊说明或标注,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。
