
 四足机器人UG(NX)12版模型源文件
四足机器人UG(NX)12版模型源文件 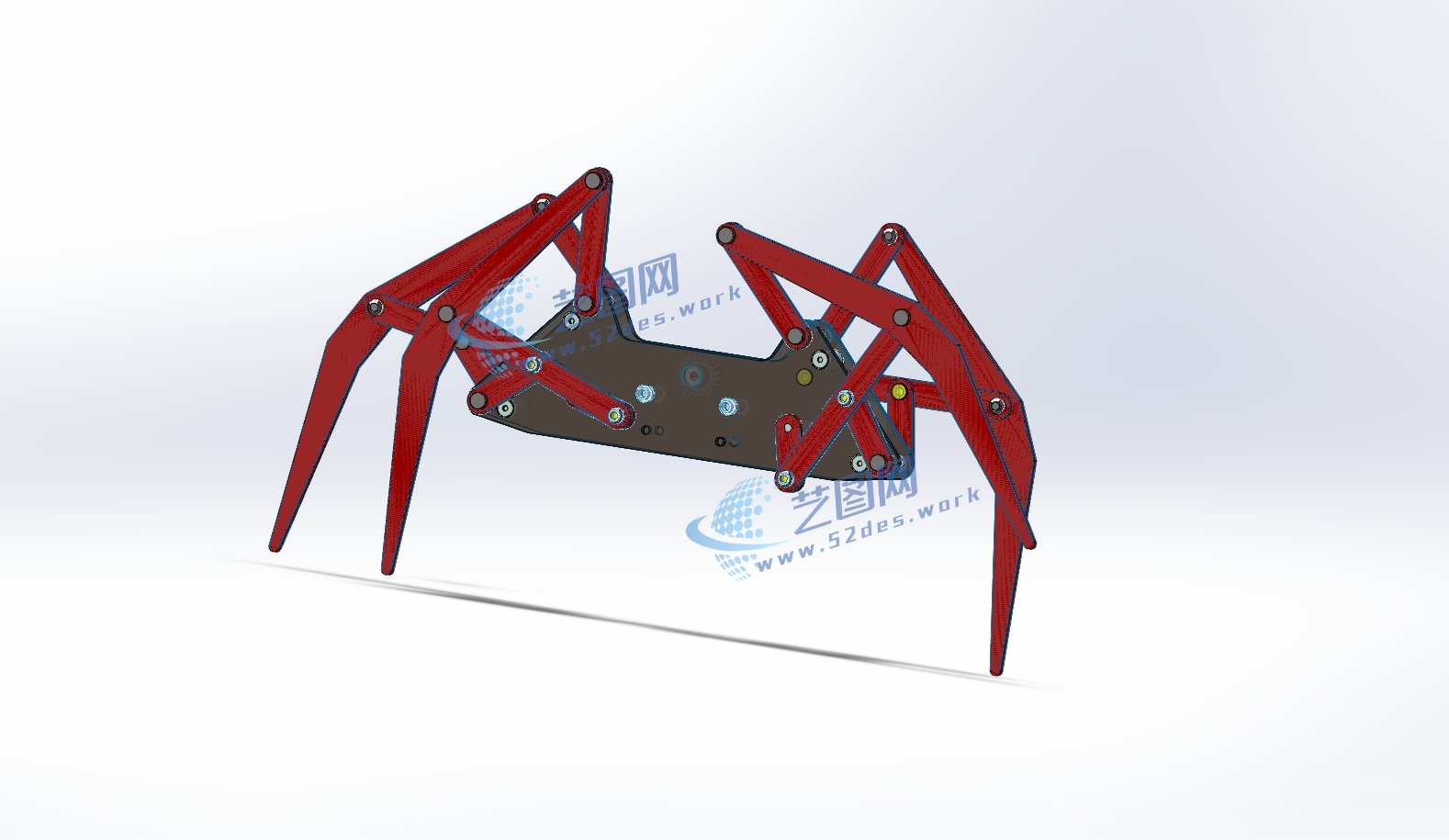 四足机器人UG(NX)12版三维装配模型
四足机器人UG(NX)12版三维装配模型 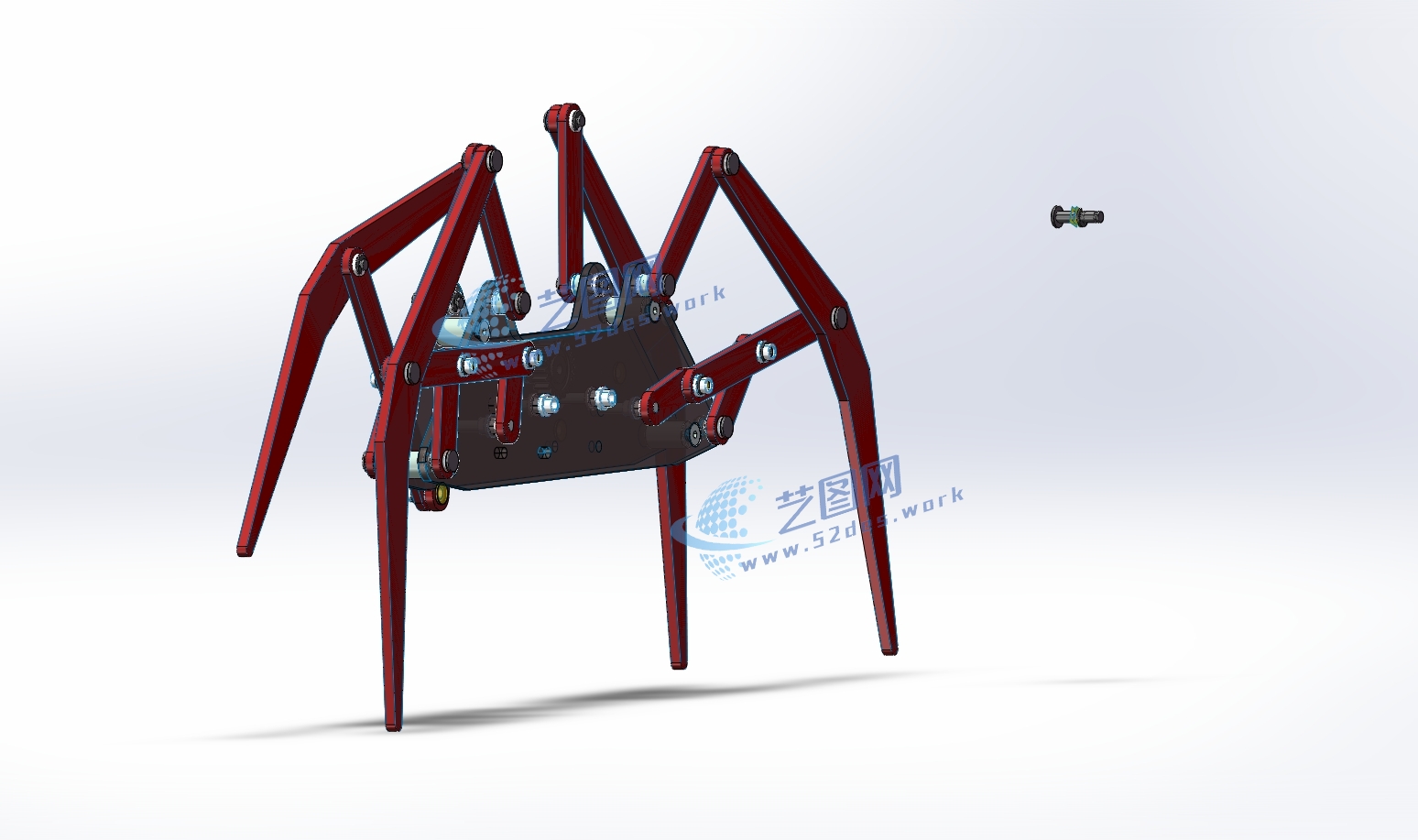 四足机器人UG(NX)12版三维装配模型
四足机器人UG(NX)12版三维装配模型 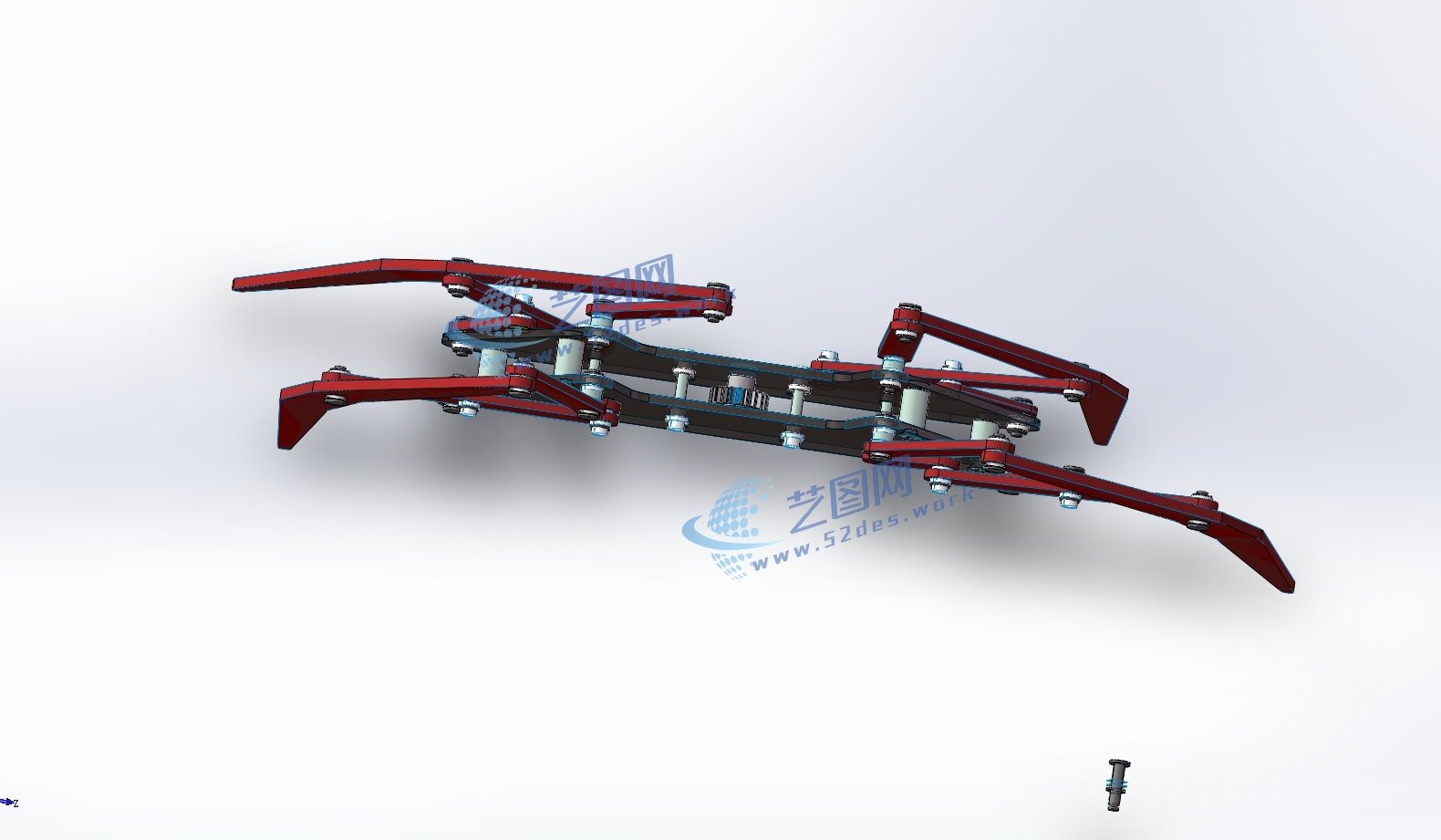 四足机器人UG(NX)12版三维装配模型
四足机器人UG(NX)12版三维装配模型 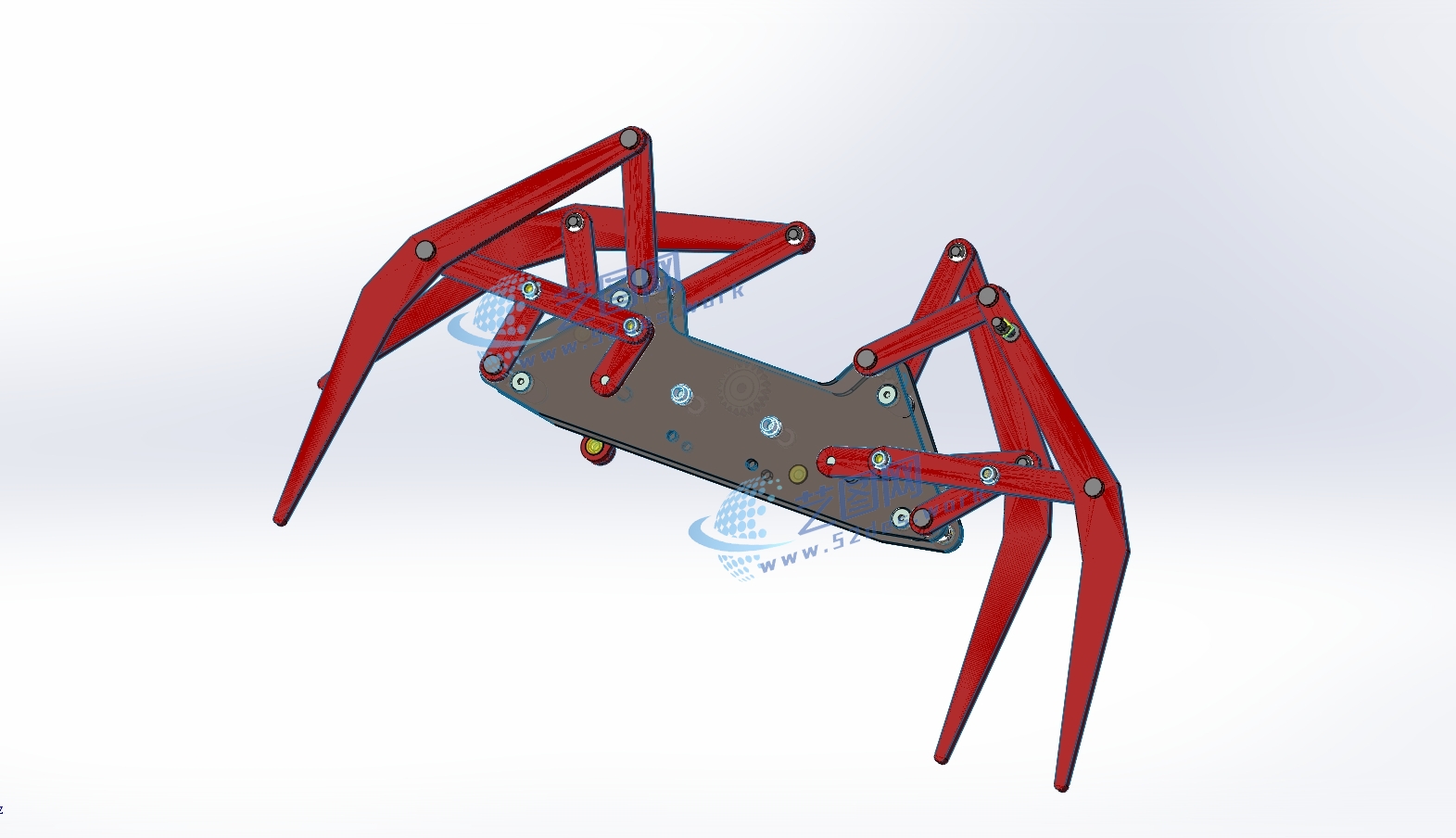
四足机器人是一种能模仿动物走路动作的机器人,由四条腿和一个主控制系统组成。四足机器人在地形不平或难以到达的区域中具有很大的优势。它们可以使用各种传感器来探测和勘察未知的地形,例如,地震灾区、深海和太空等。它们还可以被用于探索地下隧道或管道系统。该模型为ug12绘制。
声明:本站所有文章,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。
