
 机械手臂solidworks16版本模型源文件,不可编辑
机械手臂solidworks16版本模型源文件,不可编辑
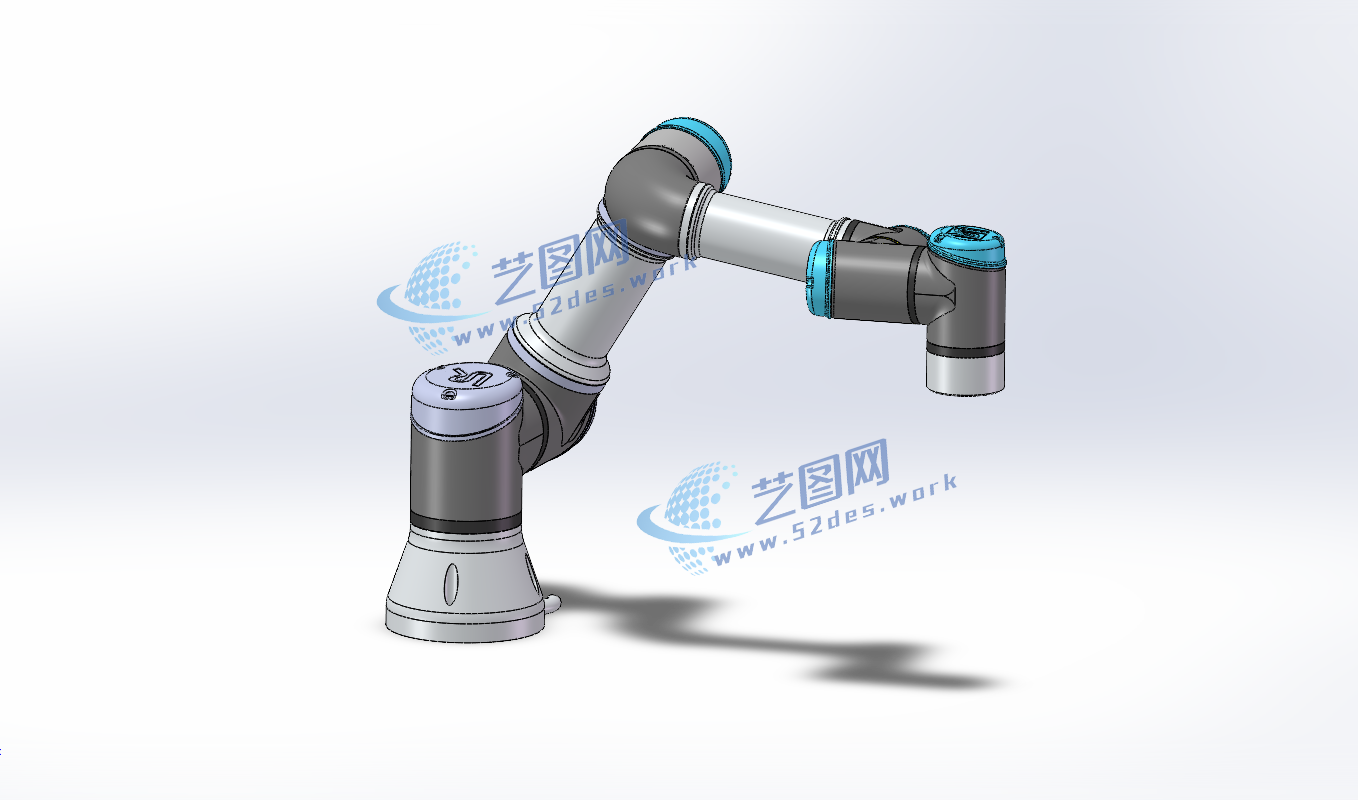
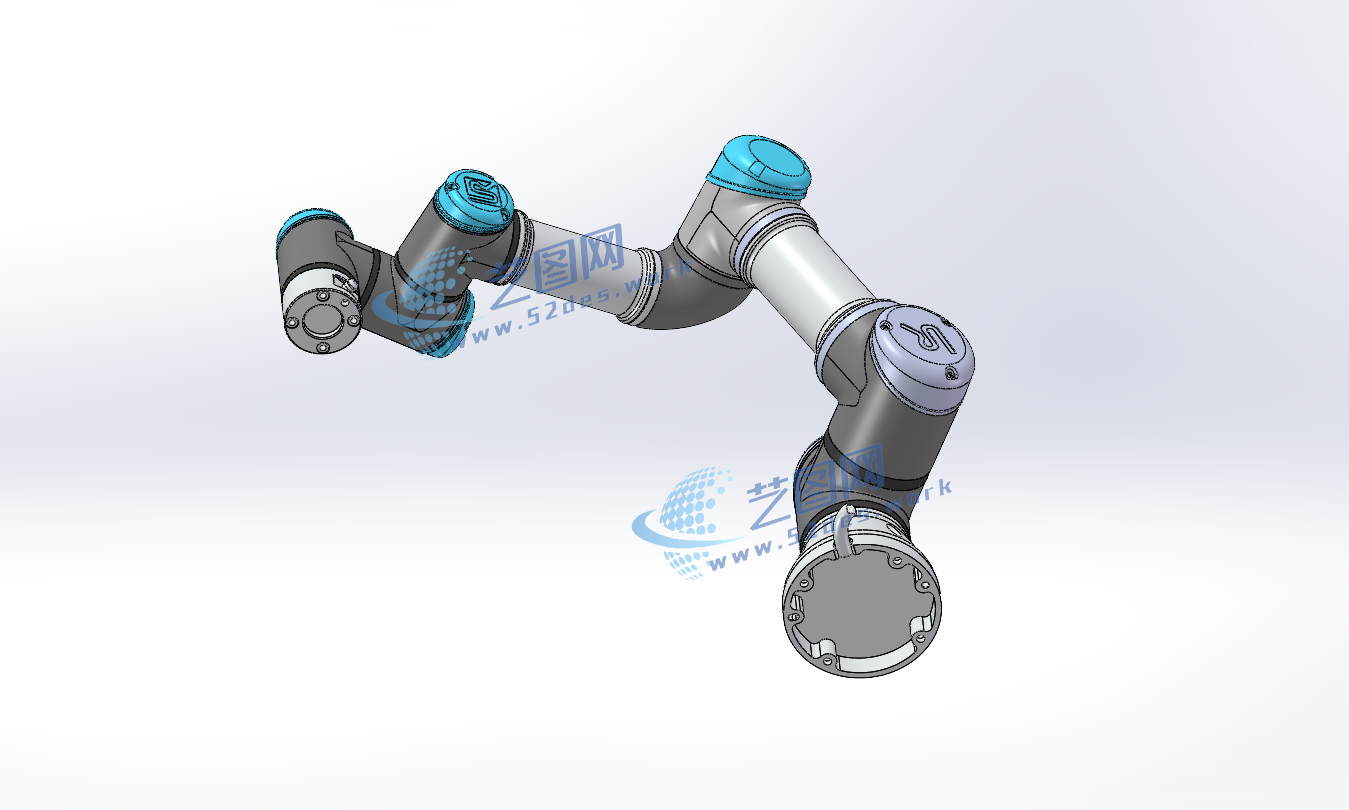
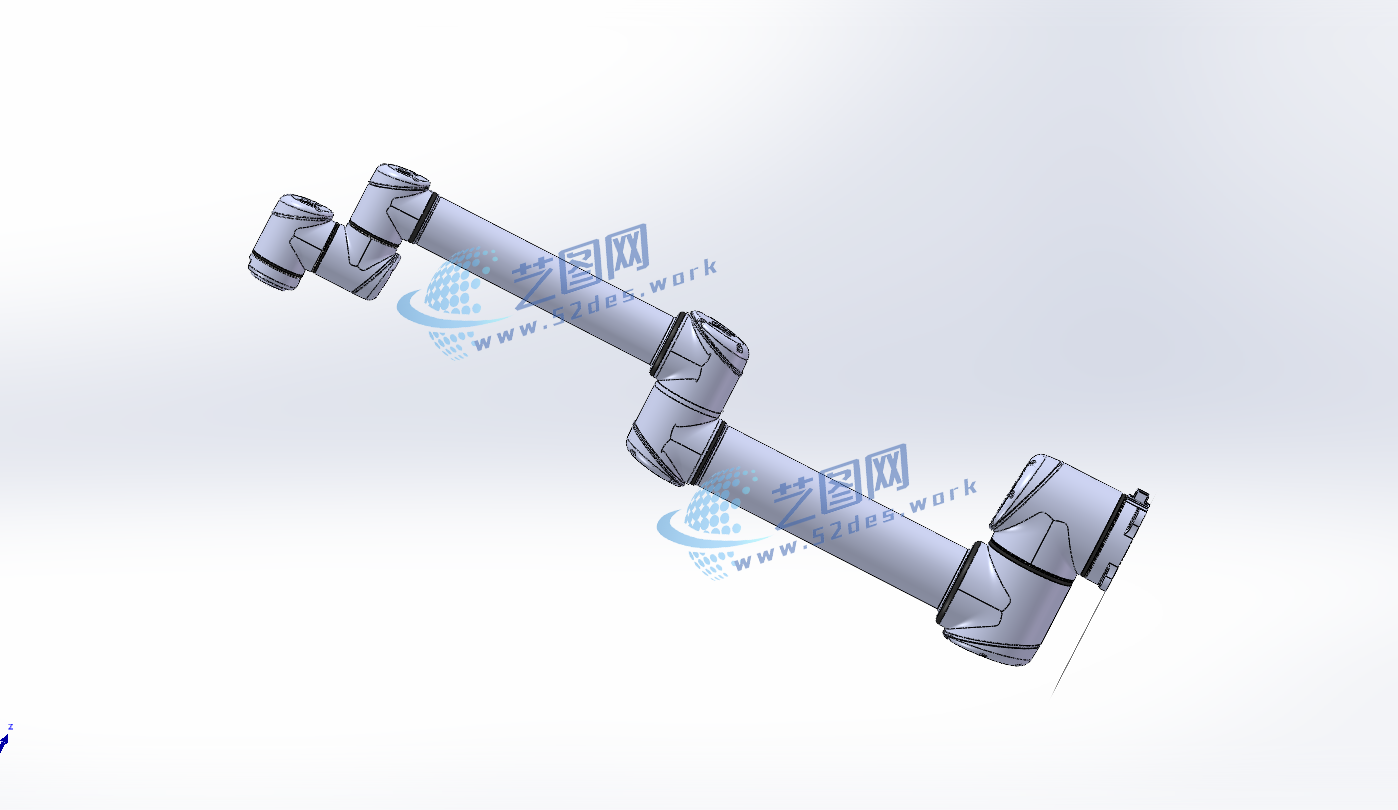
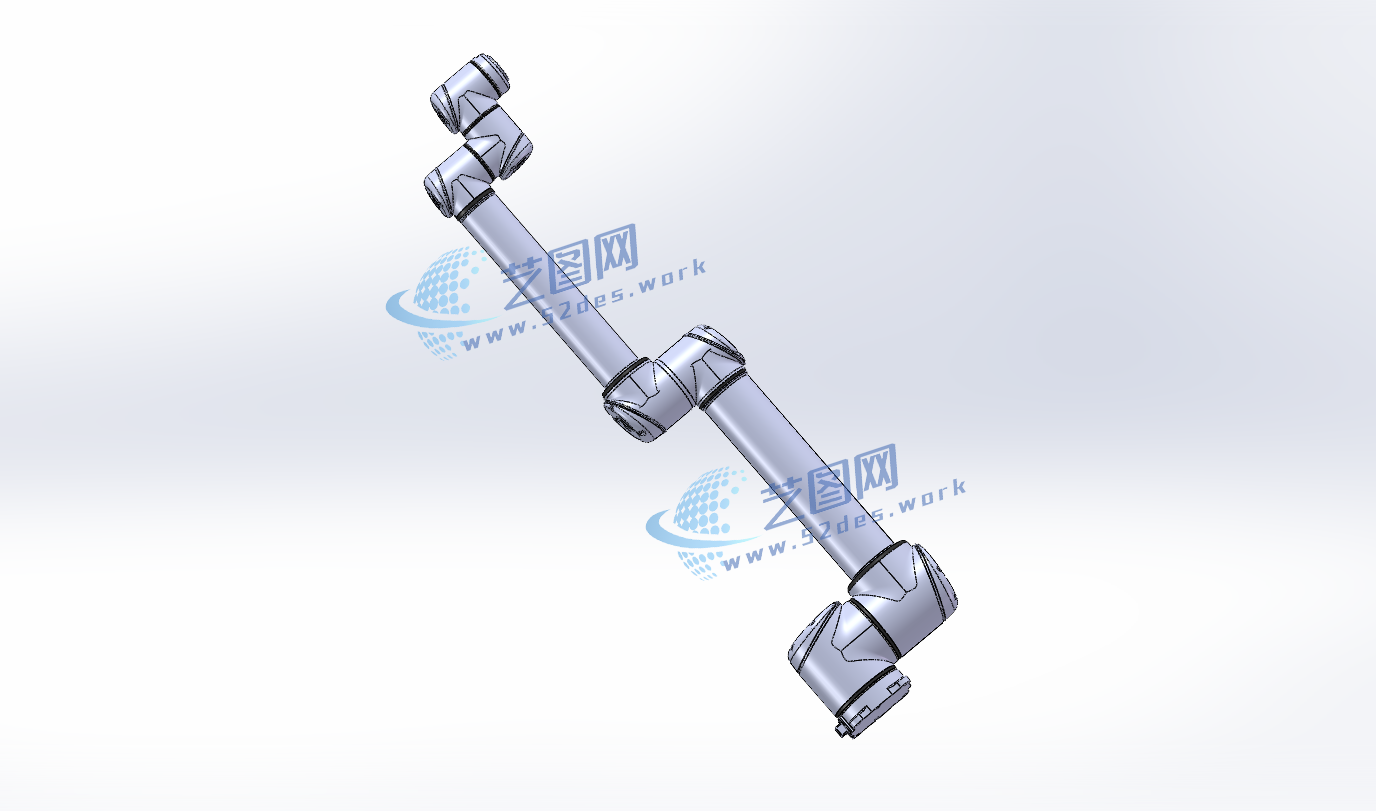 机械手臂solidworks16版本三维装配模型
机械手臂solidworks16版本三维装配模型
 机械手臂solidworks16版本三维装配模型
机械手臂solidworks16版本三维装配模型
 机械手臂solidworks16版本三维装配模型
机械手臂solidworks16版本三维装配模型
 solidworks16版本三维装配模型
solidworks16版本三维装配模型
机械手臂设计旨在提供高度灵活、精准的工业自动化解决方案。采用先进的材料和结构设计,确保机械手臂具有足够的强度和耐久性。精密的电子控制系统使其能够执行复杂的任务,实现高效的生产流程。模块化设计和灵活的关节连接方式,使机械手臂适用于各种应用场景。通过先进的传感技术和编程算法,机械手臂能够适应不同的工作环境,提高生产效率和质量。机械手臂的设计力求创新,为工业自动化注入更多智能和便利性。
声明:本站所有文章,均为本站原创发布。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。
