
 文件内容:solidworks23版三维模型、CAD图纸、设计说明书
文件内容:solidworks23版三维模型、CAD图纸、设计说明书 四自由度液压机械手solidworks23版本模型源文件,不可编辑
四自由度液压机械手solidworks23版本模型源文件,不可编辑 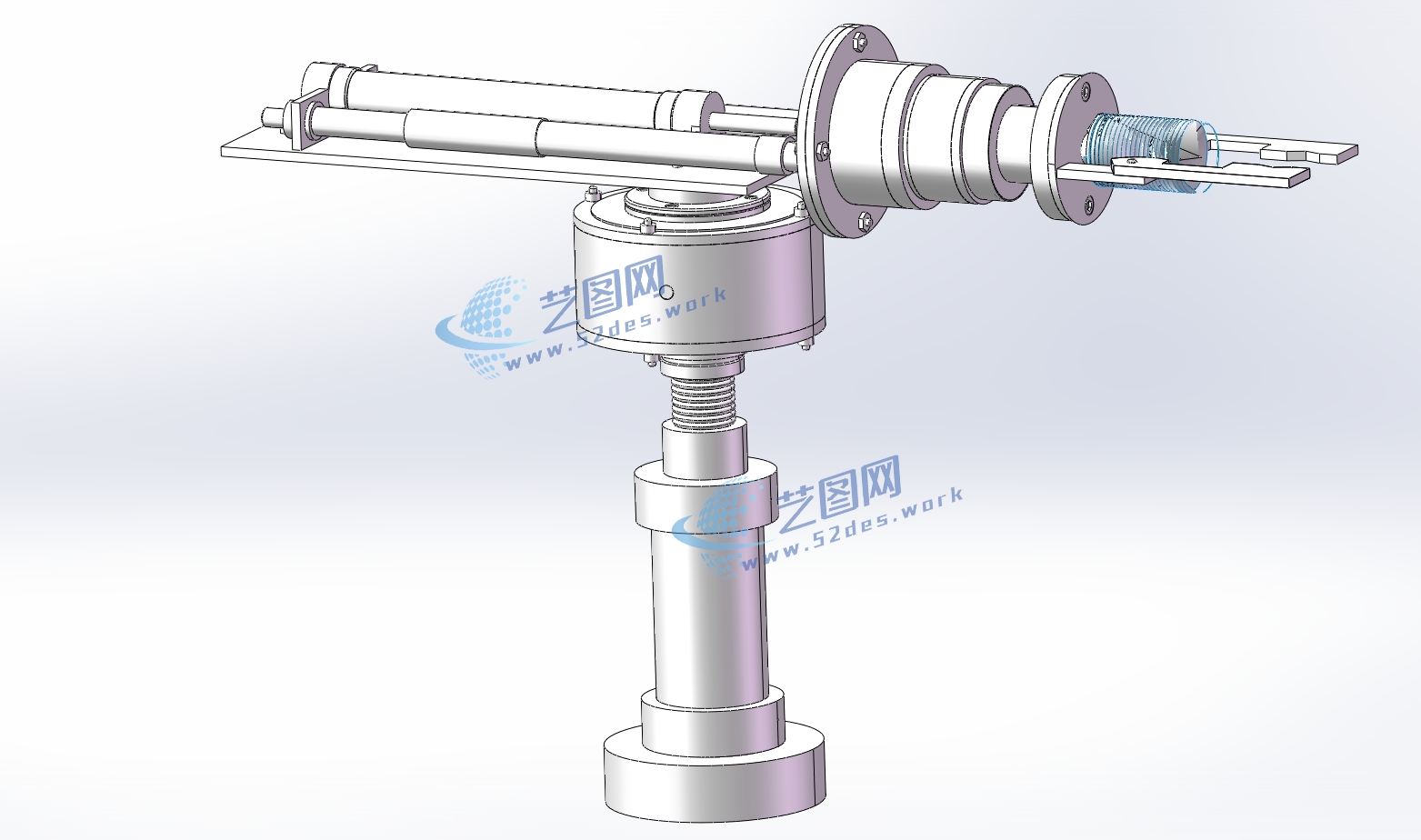 四自由度液压机械手solidworks23版本三维装配模型
四自由度液压机械手solidworks23版本三维装配模型 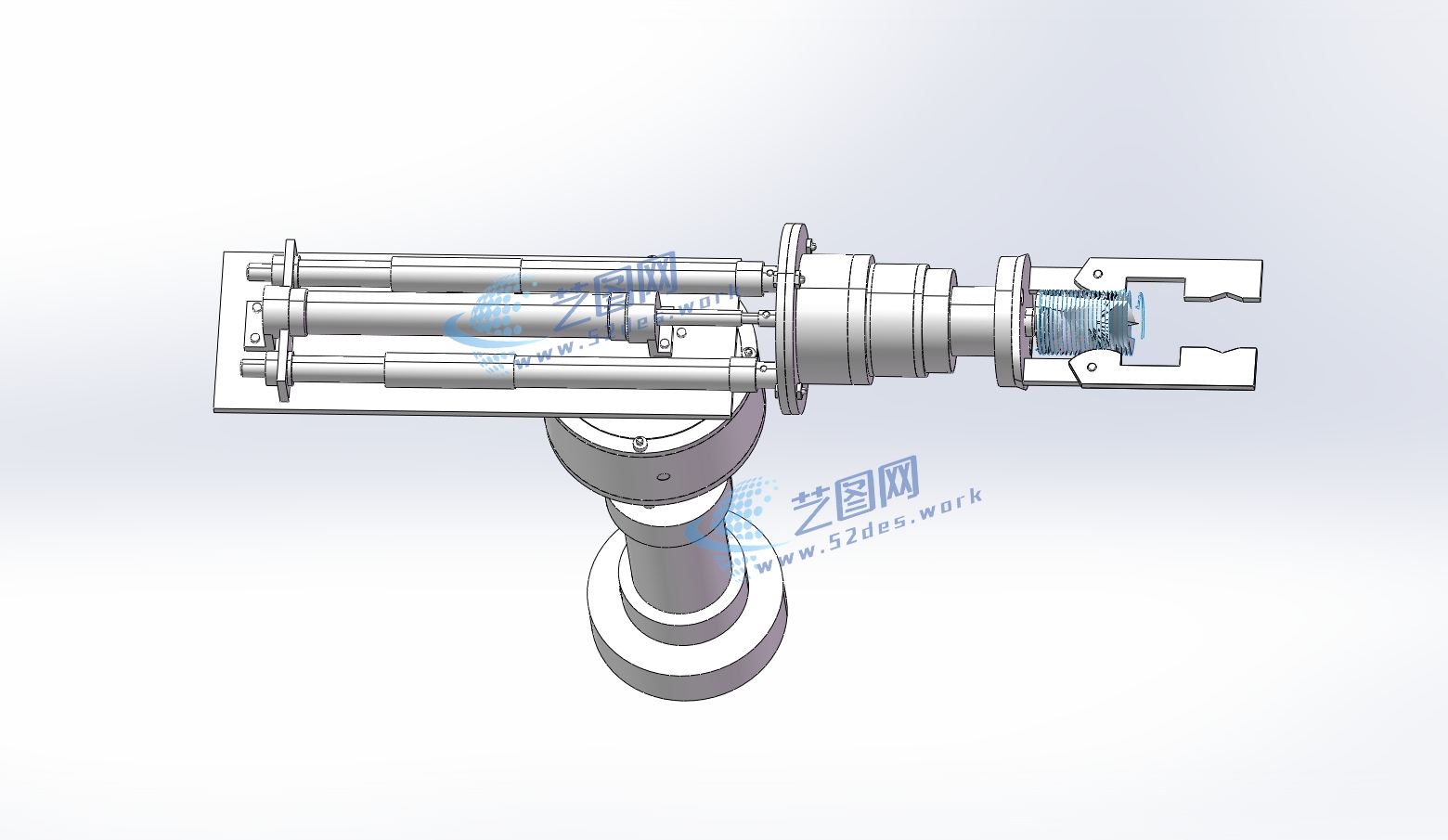 四自由度液压机械手solidworks23版本三维装配模型
四自由度液压机械手solidworks23版本三维装配模型 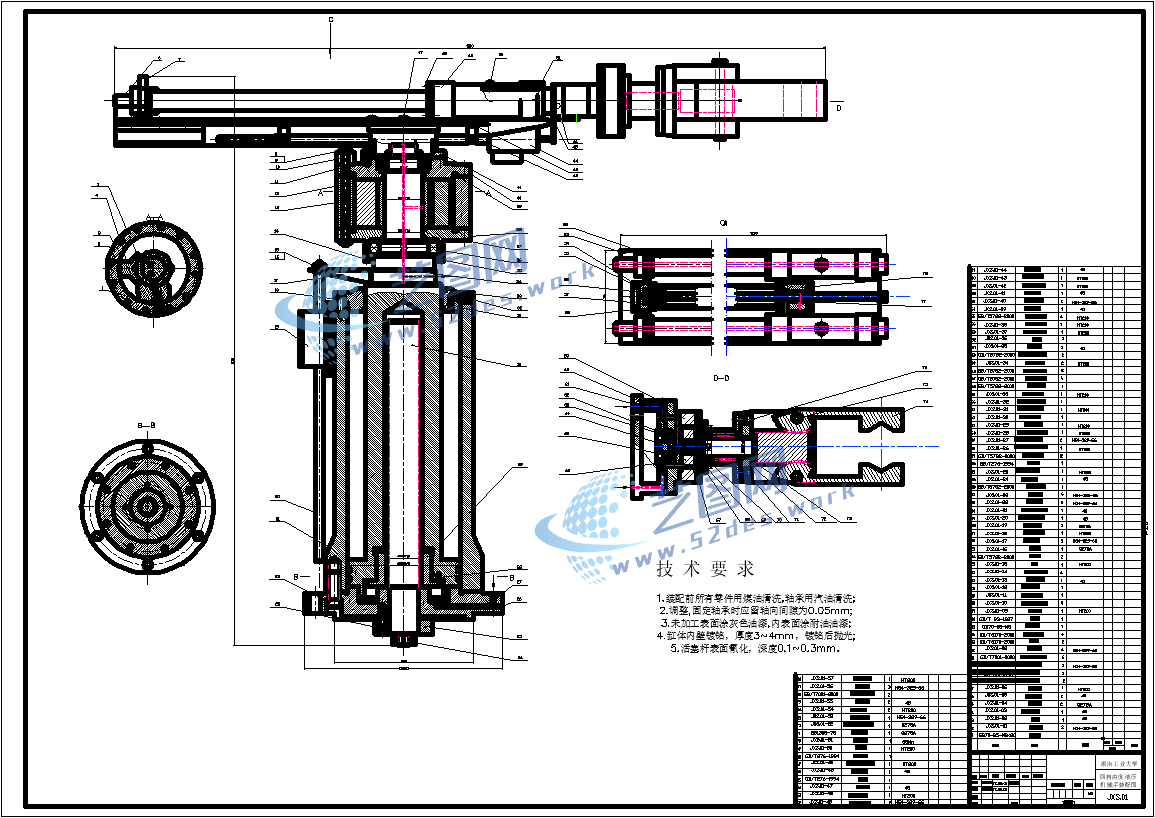 新国标CAD图纸:机械结构设计装配图
新国标CAD图纸:机械结构设计装配图 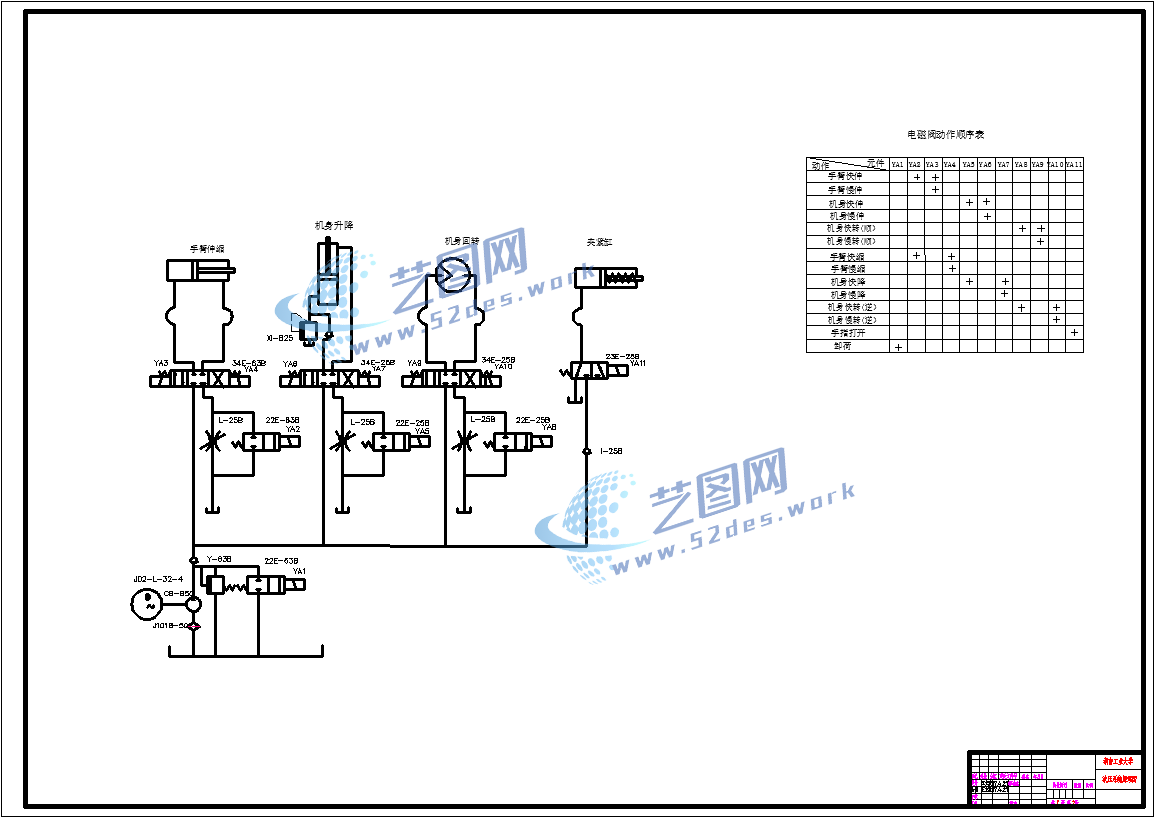 新国标CAD图纸:零件图
新国标CAD图纸:零件图 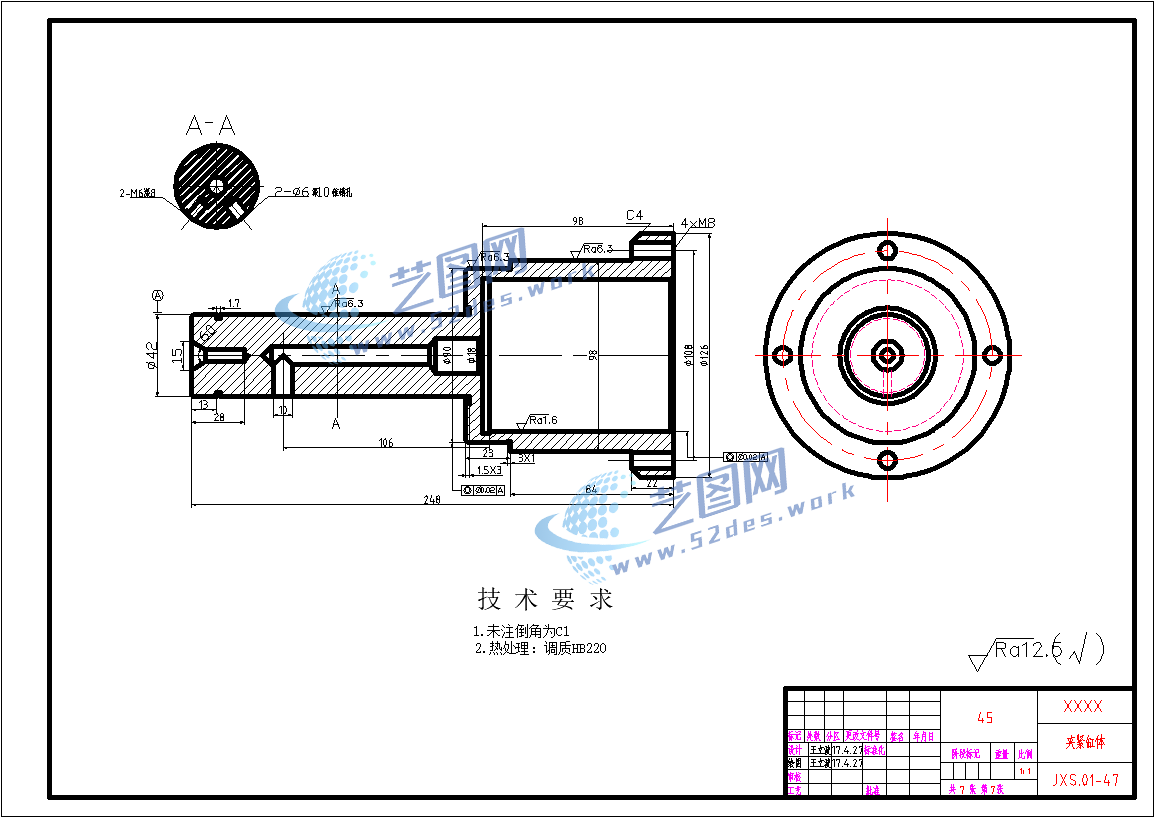 新国标CAD图纸:零件图
新国标CAD图纸:零件图 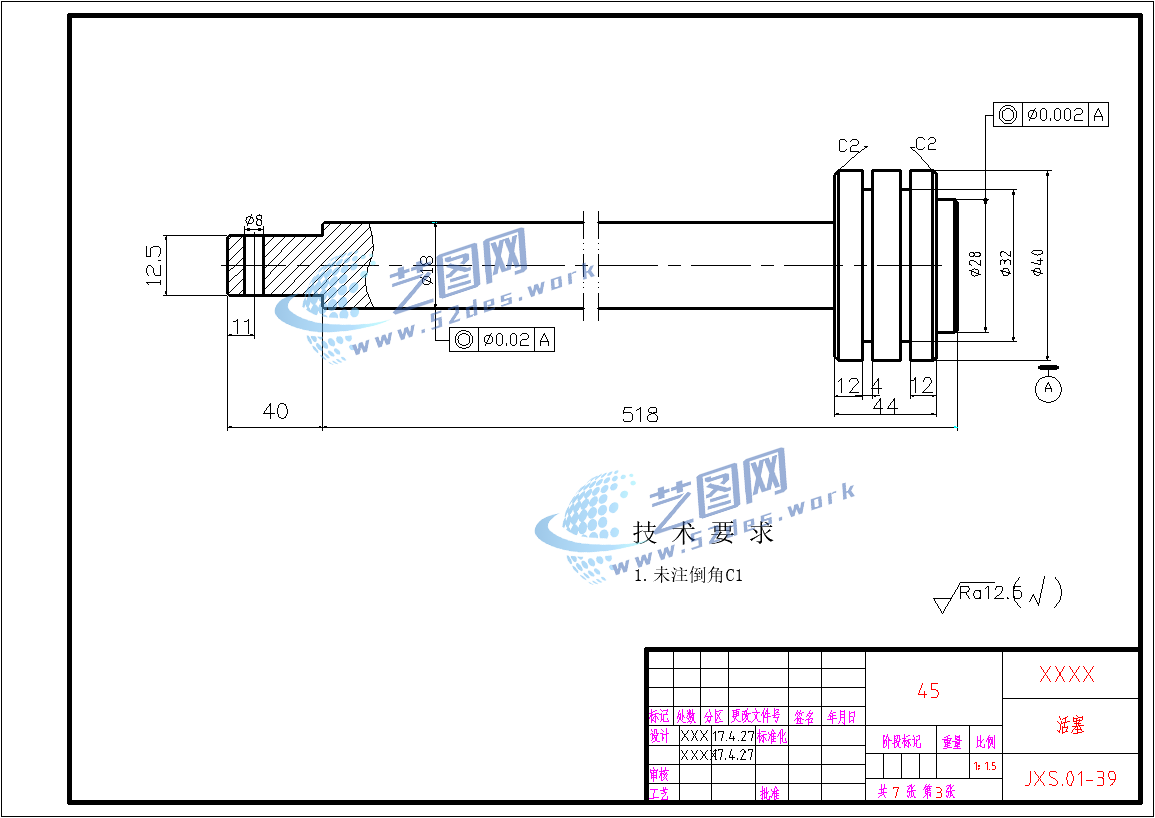 新国标CAD图纸:零件图
新国标CAD图纸:零件图 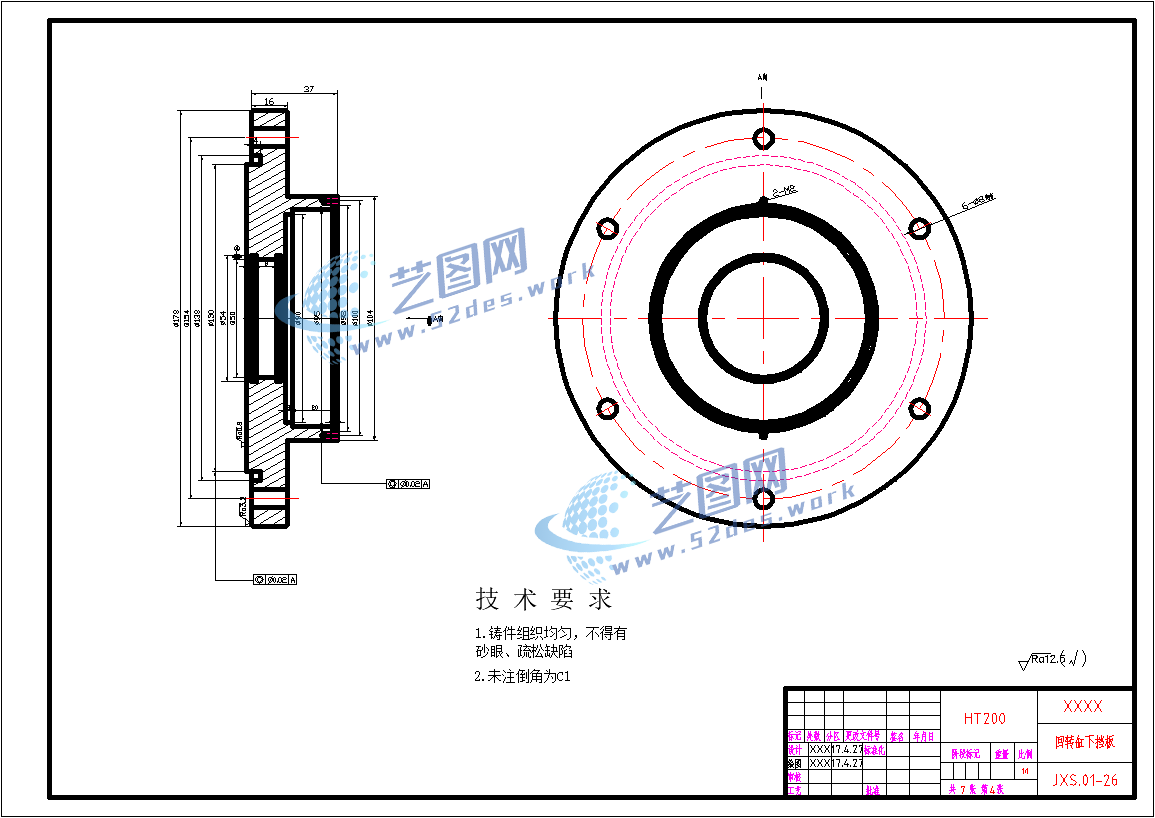 新国标CAD图纸:零件图
新国标CAD图纸:零件图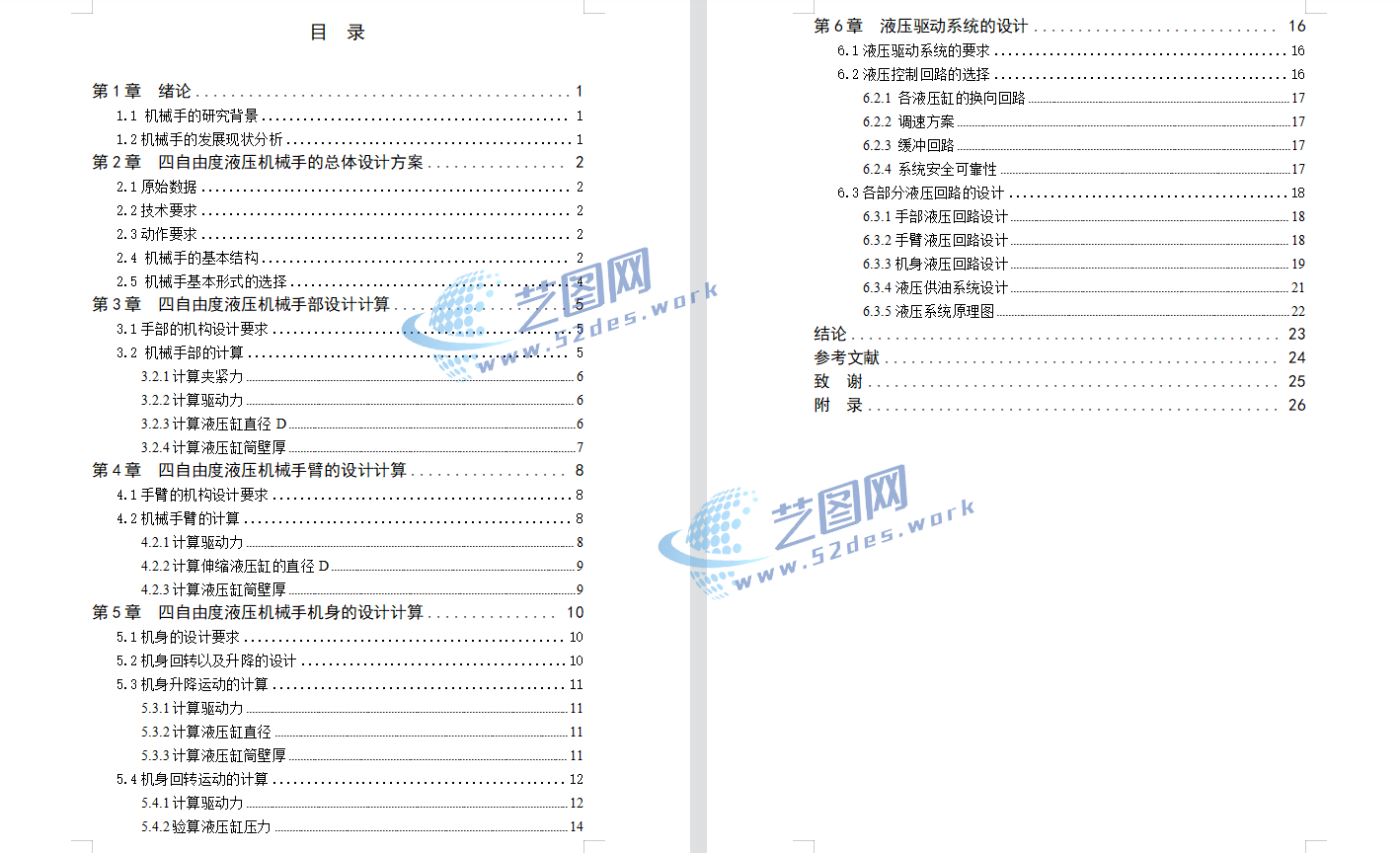 四自由度液压机械手设计说明书目录
四自由度液压机械手设计说明书目录 
机械手是我国这些年来发展起来的高科技学科。它包括了许多机械类学科的重要研究内容和成果,随着我国的科学与技术的发展与完善, 机械手的用途和生产发展方向也在不断加大中。比如自动化的生产,危险的行业,石油生产,化学行业,汽车的生产等等,同时也已开始发展到电能,航空与航天行业,生物研究和医药生产,生化武器的研究等高科技方向。所以对机械手的研究有重大意义。此外液压机械手,就具有更高的研究价值,随着工业自动化的快速发展,以后自动化会渗透到每一个行业,而机械手也会越来越变得不可或缺。科技的研发日新月异,机械手的发展也是一天快过一天,只有始终跟随科技的脚步,才能走在创新的前沿。液压机械手是我们研究的重点,该机械手采用液压驱动,控制手臂的伸缩、手腕的回转和手部的抓放运动,上下运动由电机控制。
机械手主要是由顺序控制系统、动作机构和液压驱动系统等所组成。同时采用液压传动方式,来实现机械手有一定速度和时间的有序动作。本设计的重点是机械结构和液压系统部分。其中主要内容包括了机械手的坐标采用圆柱坐标且具有4个自由度,机械手抓紧重量为5-20KG,同时规定手臂运动行程和速度以及机械手定位采用点位控制,定位精度为1mm。此四自由度液压机械手结构简单,且能够实现多种动作,具有很大的研究价值。
本设计主要基于机械设计等知识确定设计方案及结构参数,并进行相关计算、检验,同时在设计过程中不断优化创新,达到提高设备的性能和降低成本的目的。
