
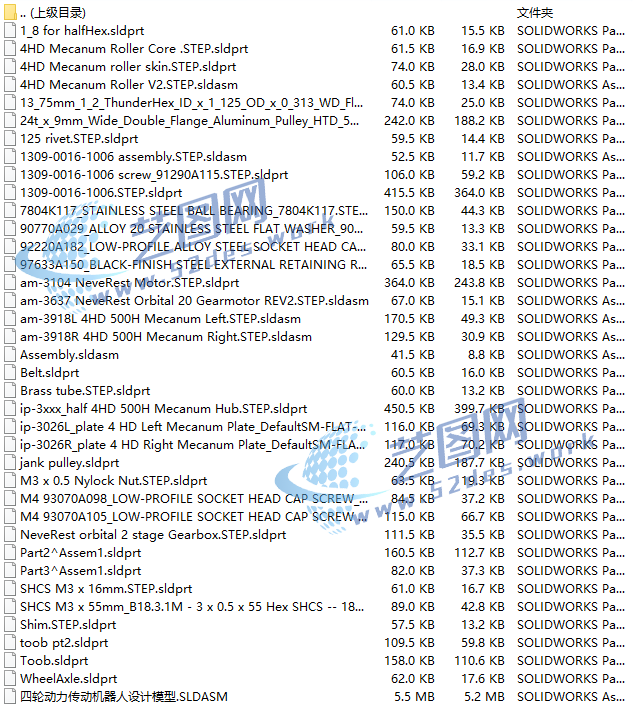
 四轮动力传动机器人solidworks10版本模型源文件
四轮动力传动机器人solidworks10版本模型源文件 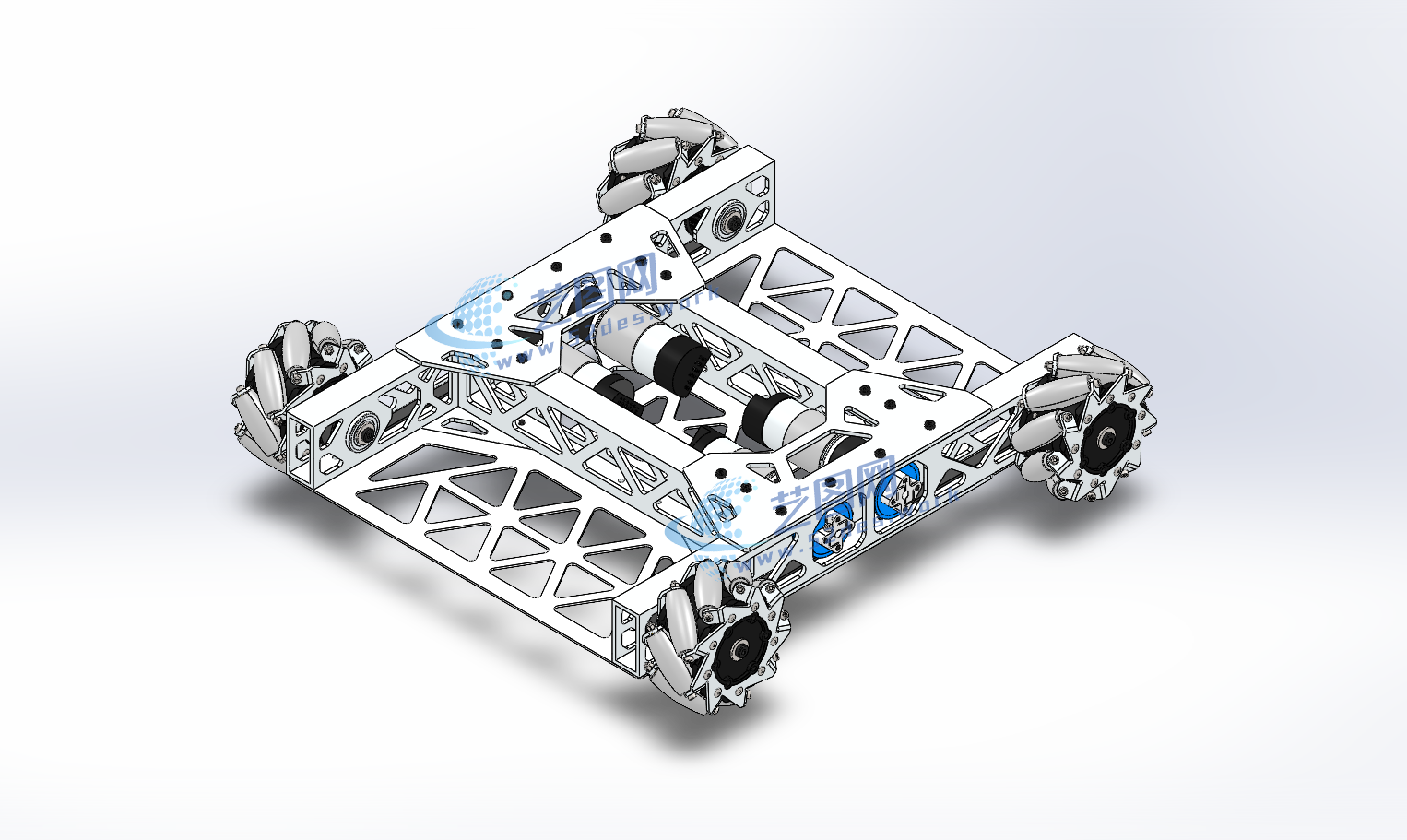 四轮动力传动机器人solidworks10版本三维装配模型
四轮动力传动机器人solidworks10版本三维装配模型 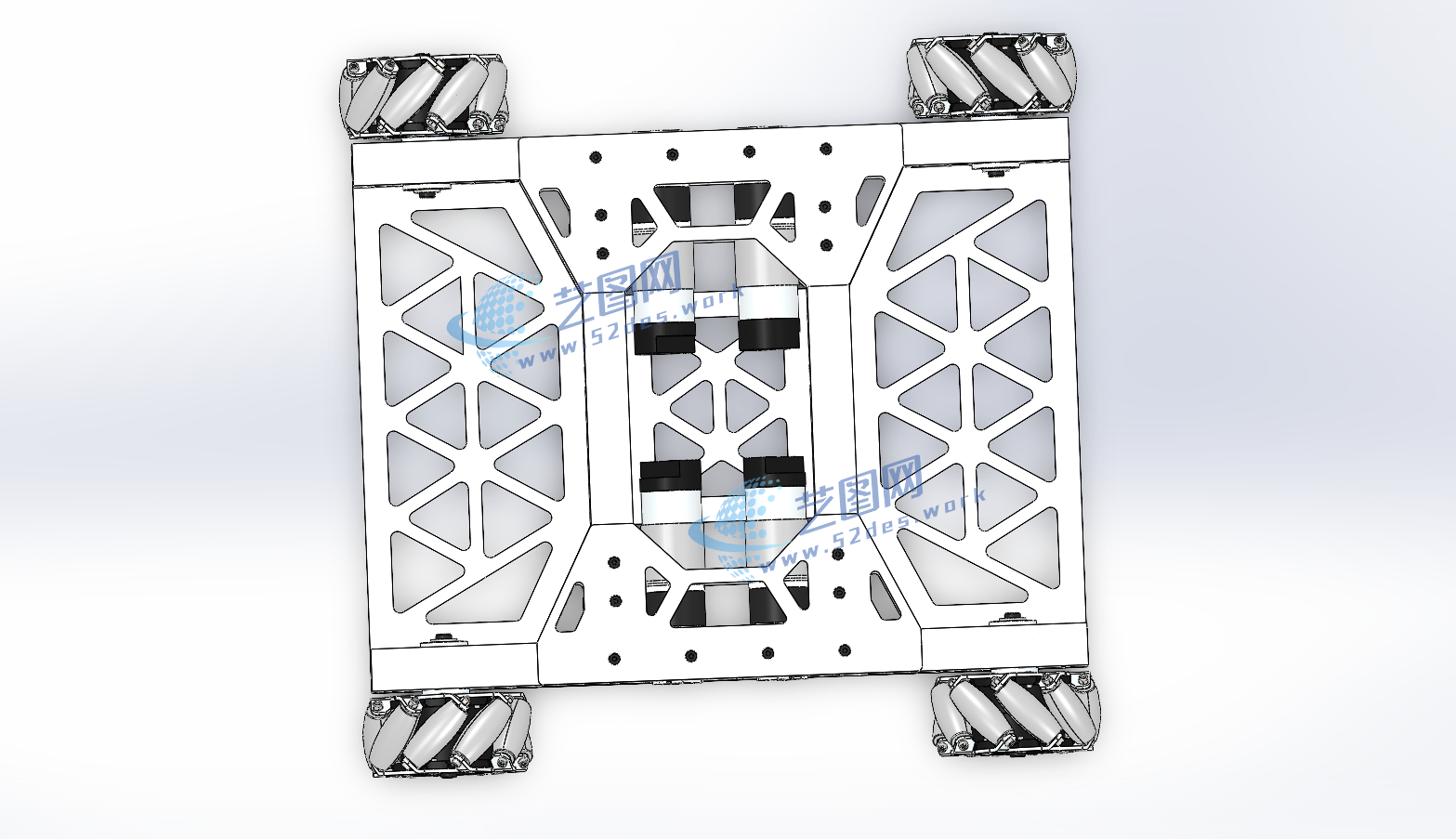 四轮动力传动机器人solidworks10版本三维装配模型
四轮动力传动机器人solidworks10版本三维装配模型  四轮动力传动机器人solidworks10版本三维装配模型
四轮动力传动机器人solidworks10版本三维装配模型 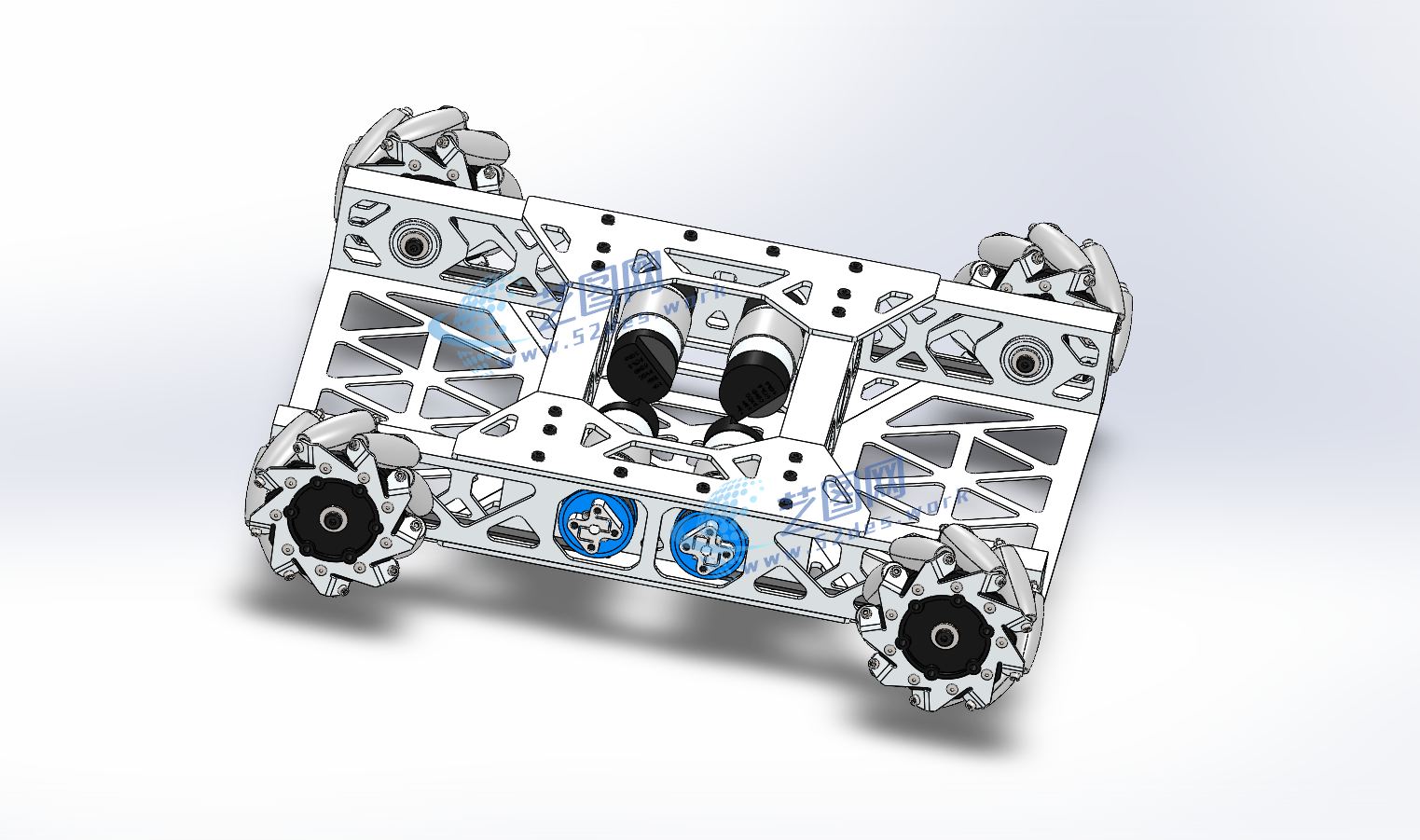
四轮动力传动机器人是一种具有四个轮子的机器人结构,通常包括前后两对轮子,每一对都由一个电动驱动器驱动。这四个轮子允许机器人在水平面上自由移动,并具有较高的机动性。机器人的结构还包括底盘、传感器系统、控制单元和电源等组件。底盘是机器人的主体支架,承载着各个组件。传感器系统用于感知环境和采集数据,控制单元负责处理传感器数据、决策和路径规划,电源则提供机器人所需的电能。

