
 机械螃蟹solidworks22版本模型源文件,可编辑,含参数
机械螃蟹solidworks22版本模型源文件,可编辑,含参数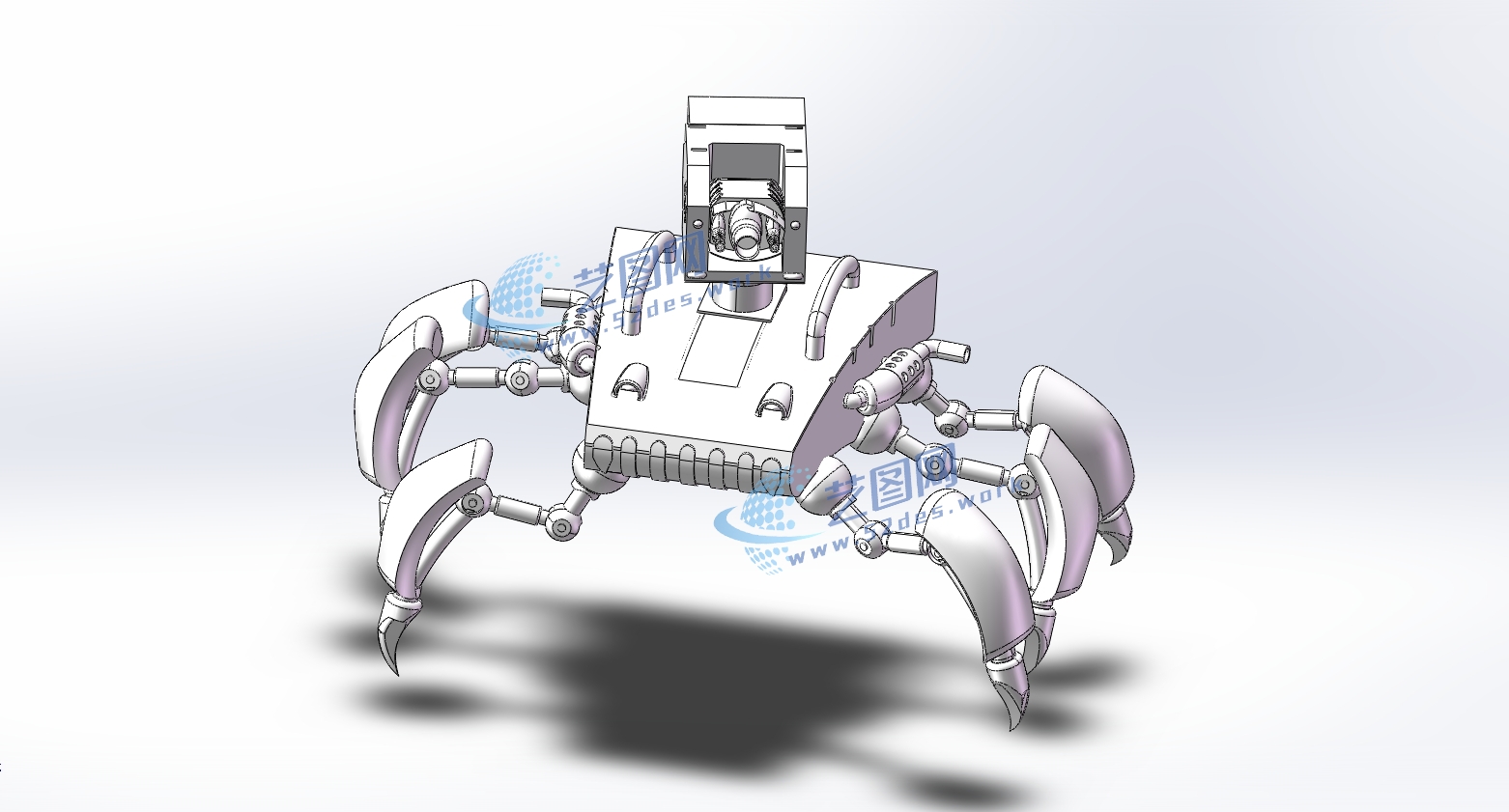 机械螃蟹solidworks22版本三维装配模型
机械螃蟹solidworks22版本三维装配模型 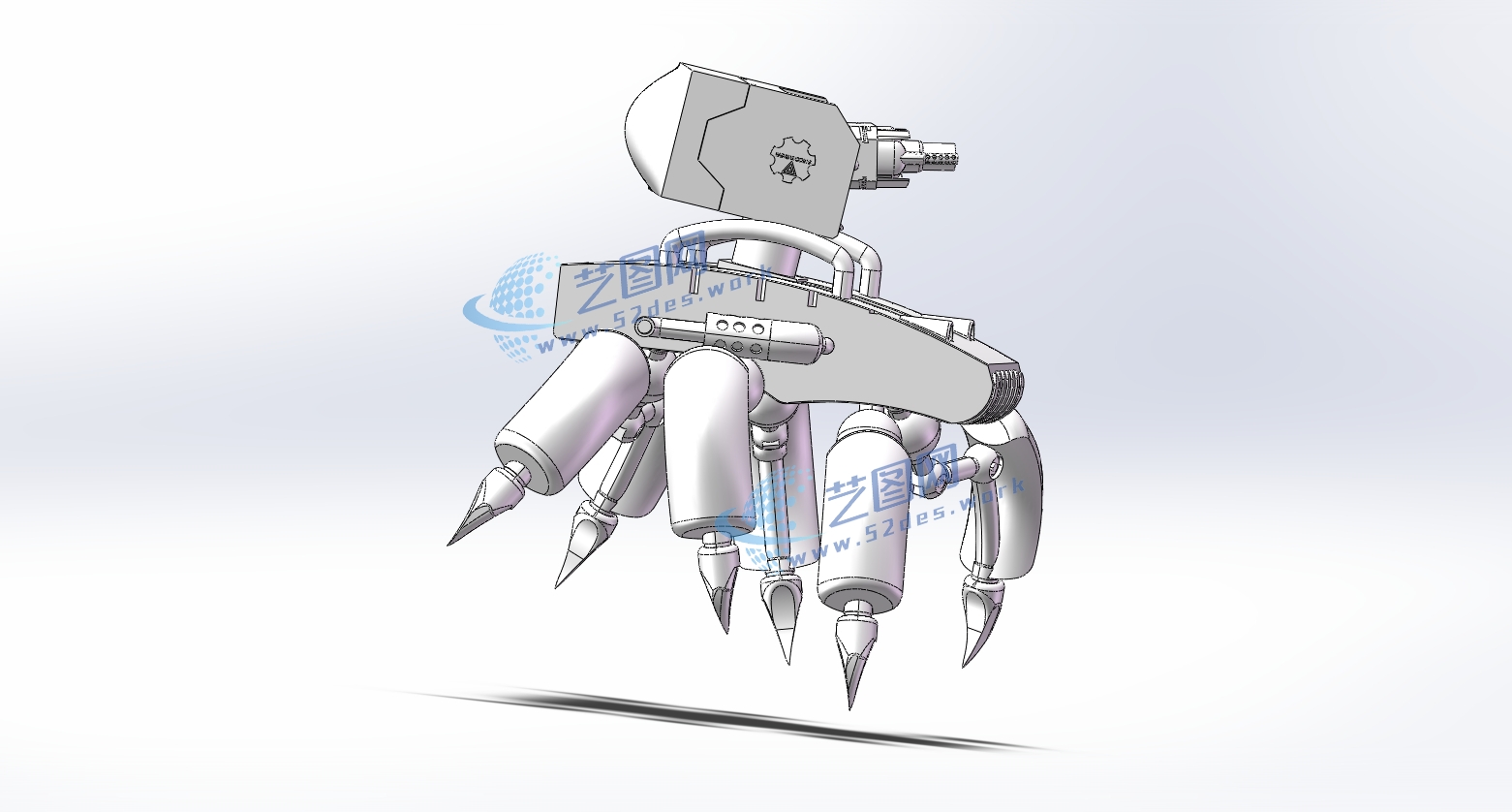 机械螃蟹solidworks22版本三维装配模型
机械螃蟹solidworks22版本三维装配模型 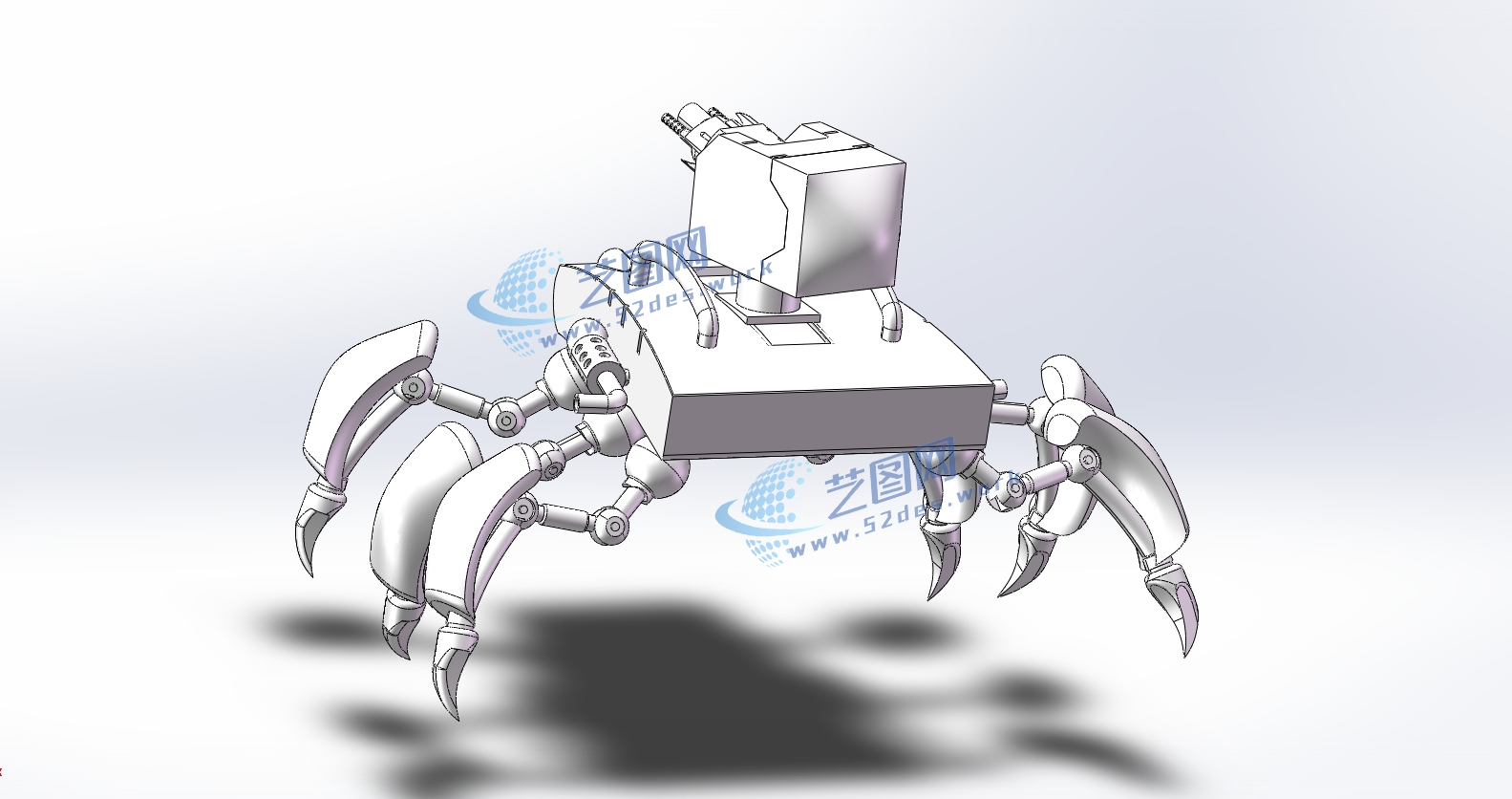 机械螃蟹solidworks22版本三维装配模型机械螃蟹solidworks22版本三维装配模型
机械螃蟹solidworks22版本三维装配模型机械螃蟹solidworks22版本三维装配模型 
机械螃蟹的结构设计包括一个坚固的外壳,内部配置了多个机械关节、驱动装置、感应器组、控制单元和电源系统。机械关节模仿了螃蟹的关节结构,允许机器螃蟹在多个方向上自由运动和抓取。驱动装置通常使用电机、液压或气动系统,用于驱动关节运动。感应器组包括触摸传感器、距离传感器和视觉传感器,用于感知周围环境和检测目标。控制单元协调关节运动、感应器数据的处理,以实现机械螃蟹的智能导航和任务执行。电源系统为机器螃蟹提供所需的电力。整个结构设计旨在提供生物机械学的启发,创造出具有生物特性的机器人,适用于各种领域,如教育、科研和娱乐,以展示生物学和工程学的结合。

