
 伺服拧紧机器人solidworks20版本模型源文件
伺服拧紧机器人solidworks20版本模型源文件 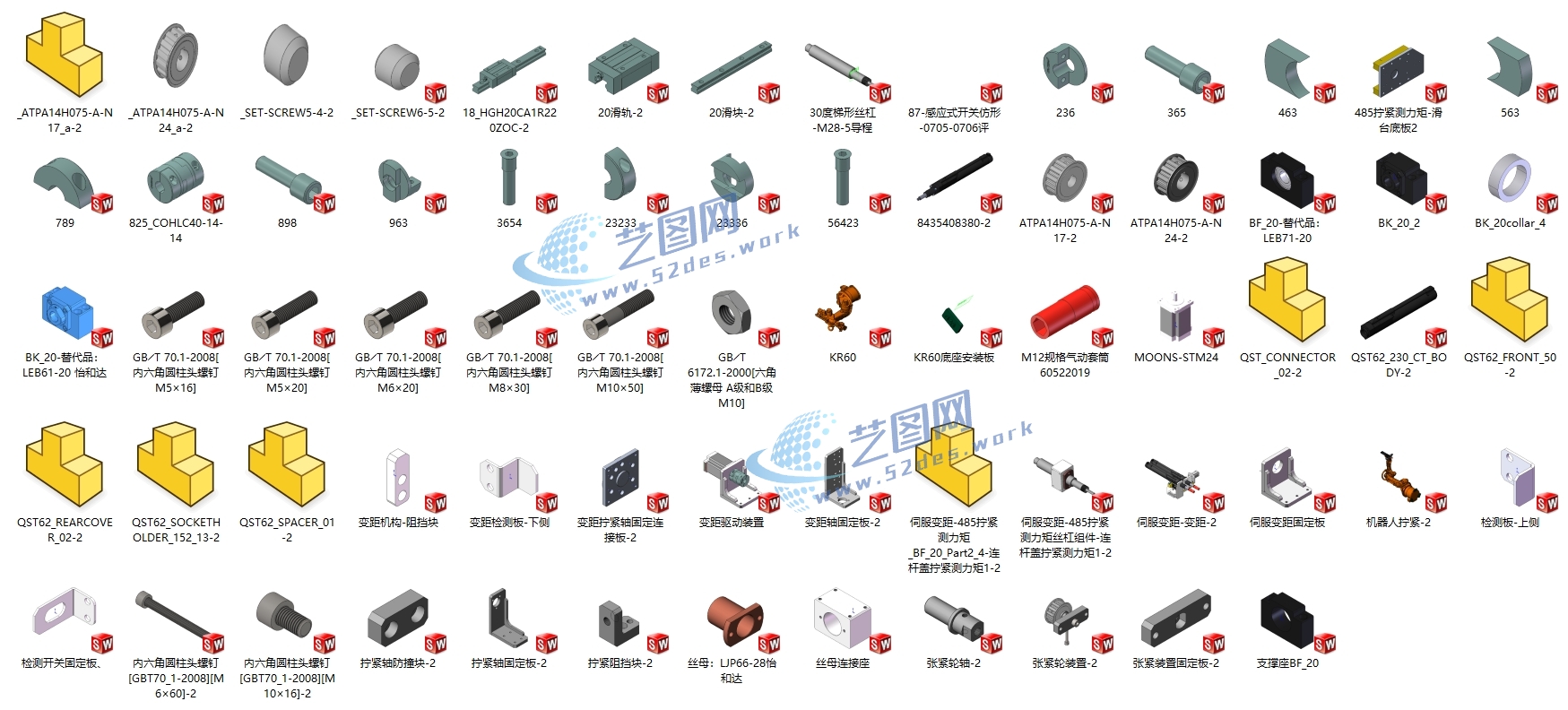 伺服拧紧机器人solidworks20版本、三维模型零件预览图
伺服拧紧机器人solidworks20版本、三维模型零件预览图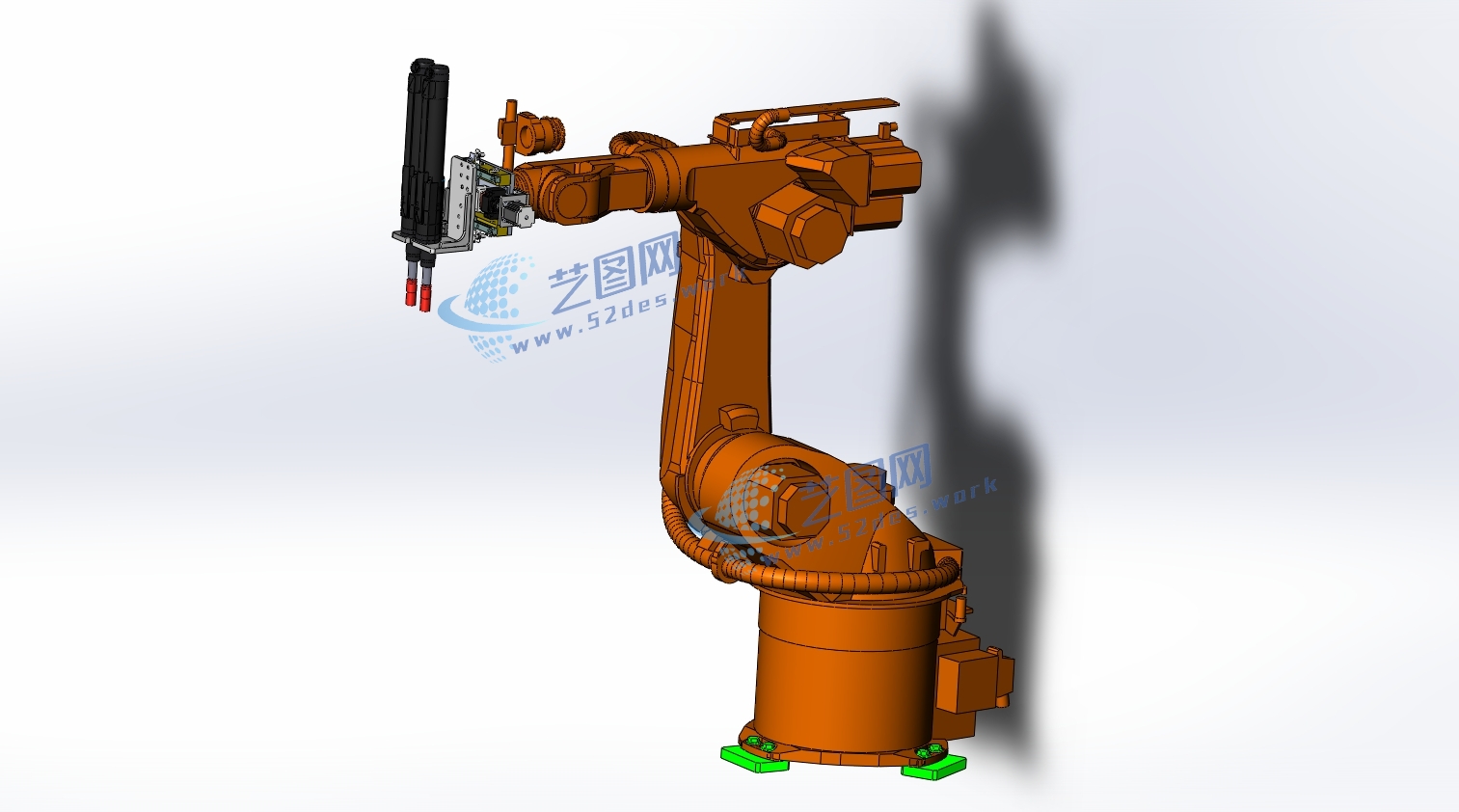 伺服拧紧机器人solidworks20版本三维装配模型
伺服拧紧机器人solidworks20版本三维装配模型 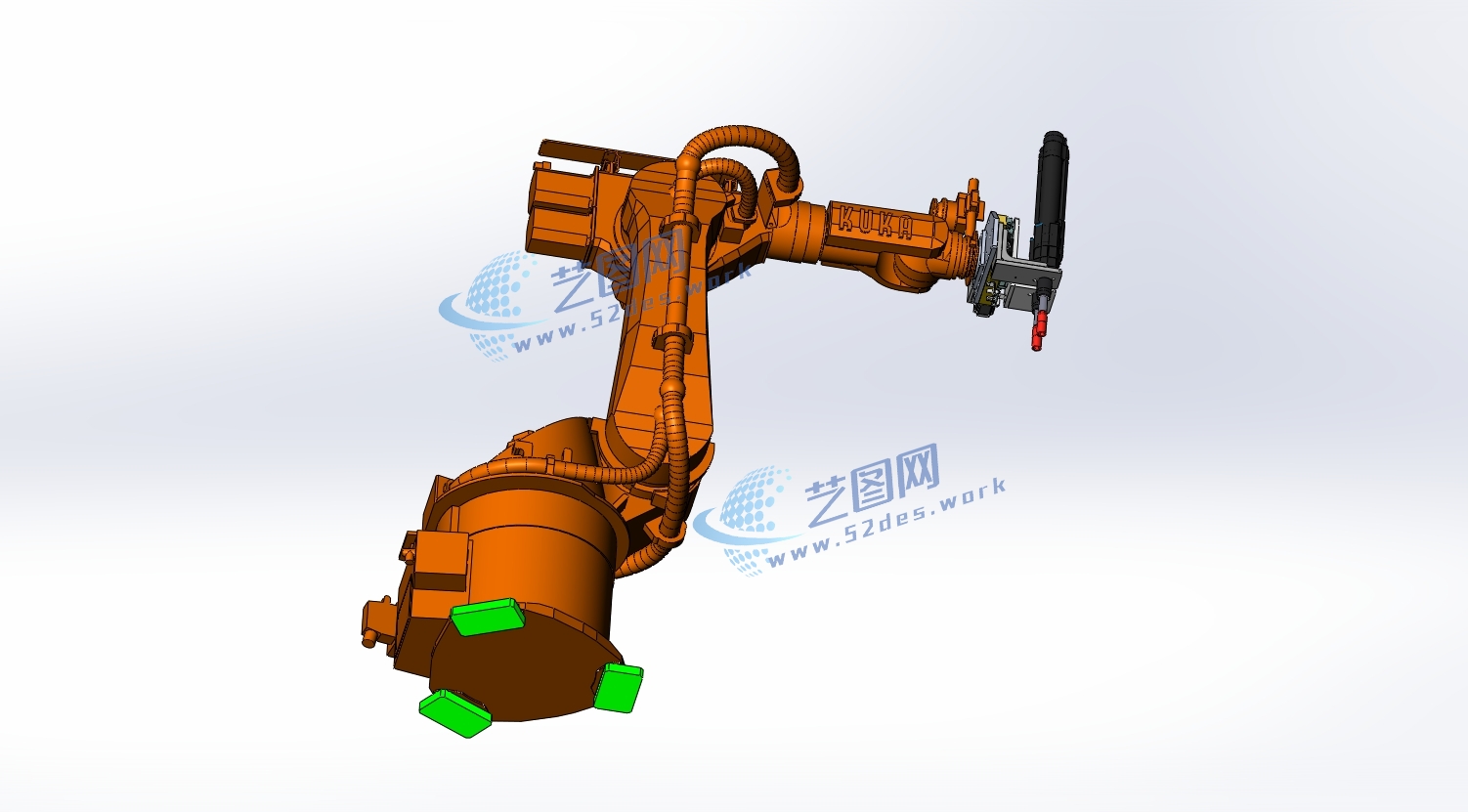 伺服拧紧机器人solidworks20版本三维装配模型
伺服拧紧机器人solidworks20版本三维装配模型 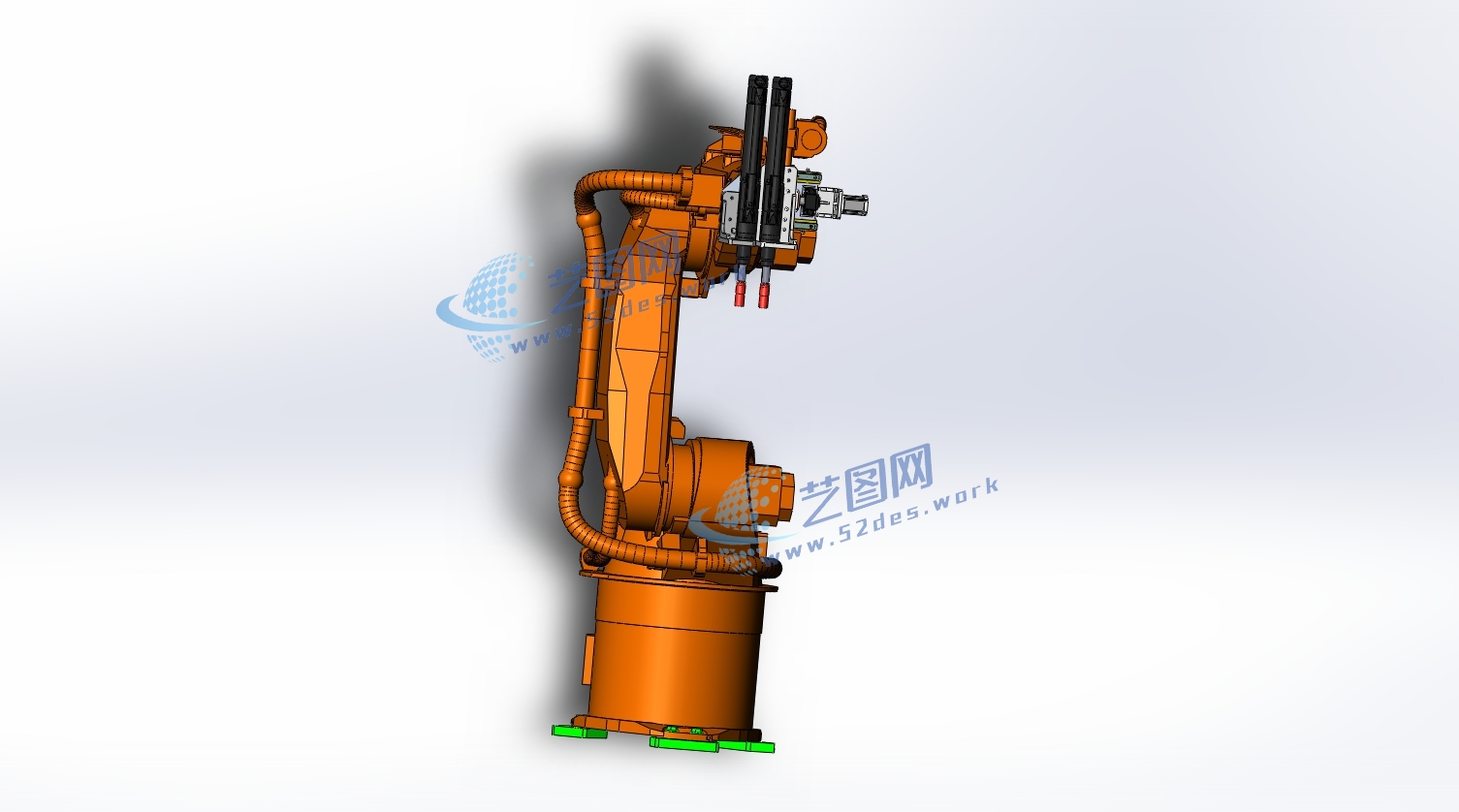 伺服拧紧机器人solidworks20版本三维装配模型
伺服拧紧机器人solidworks20版本三维装配模型 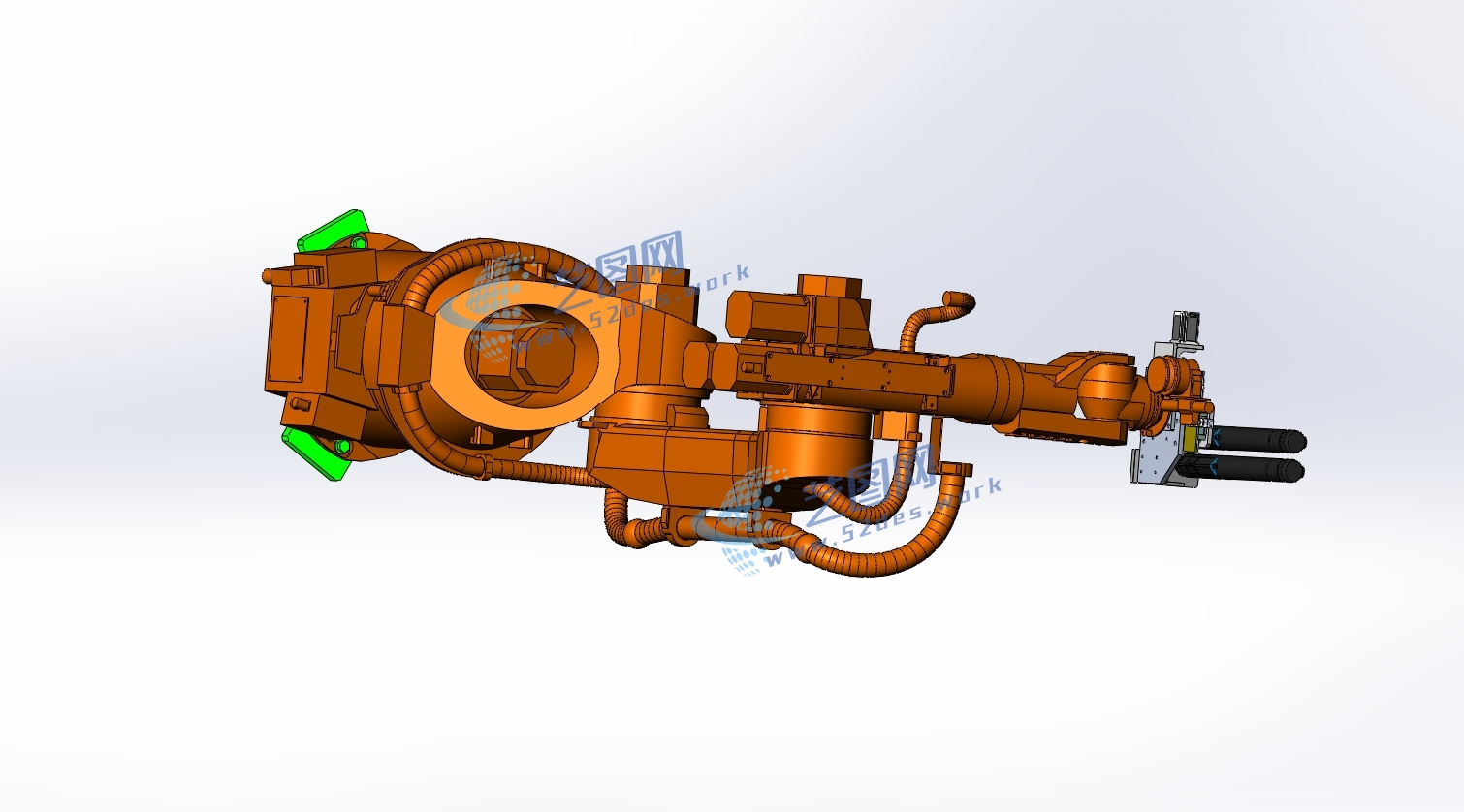
伺服拧紧机器人的结构设计包括一个坚固的底座,上面配置了伺服电动机、拧紧装置、传感器系统、控制单元和工件夹持装置。伺服电动机提供动力,用于旋转和拧紧螺栓或螺母。拧紧装置包括拧紧头和扭矩控制系统,用于确保准确的扭矩应用。传感器系统用于监测扭矩、旋转角度和拧紧质量。控制单元协调电机、拧紧装置和传感器的操作,以实现高精度的拧紧操作。工件夹持装置用于稳定固定工件,以确保准确的拧紧位置。整个结构设计旨在提供可靠、高精度的拧紧功能,适用于各种应用领域,如制造业、装配和维修,以确保紧固部件的质量和可靠性。

