
 吸盘履带机器人底盘solidworks16版本模型源文件,可编辑,含参数
吸盘履带机器人底盘solidworks16版本模型源文件,可编辑,含参数 吸盘履带机器人底盘solidworks16版本、三维模型零件预览图
吸盘履带机器人底盘solidworks16版本、三维模型零件预览图 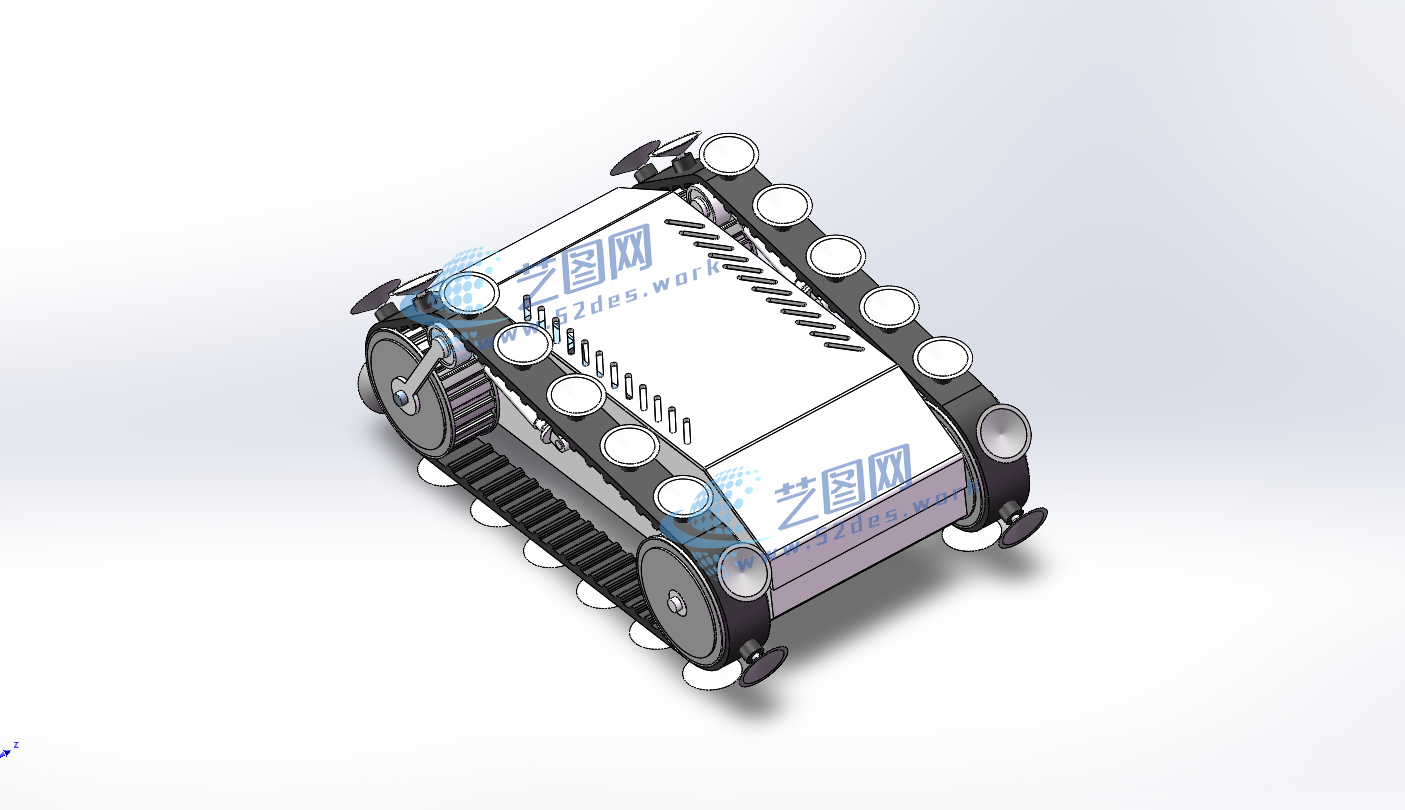 吸盘履带机器人底盘solidworks16版本三维装配模型
吸盘履带机器人底盘solidworks16版本三维装配模型 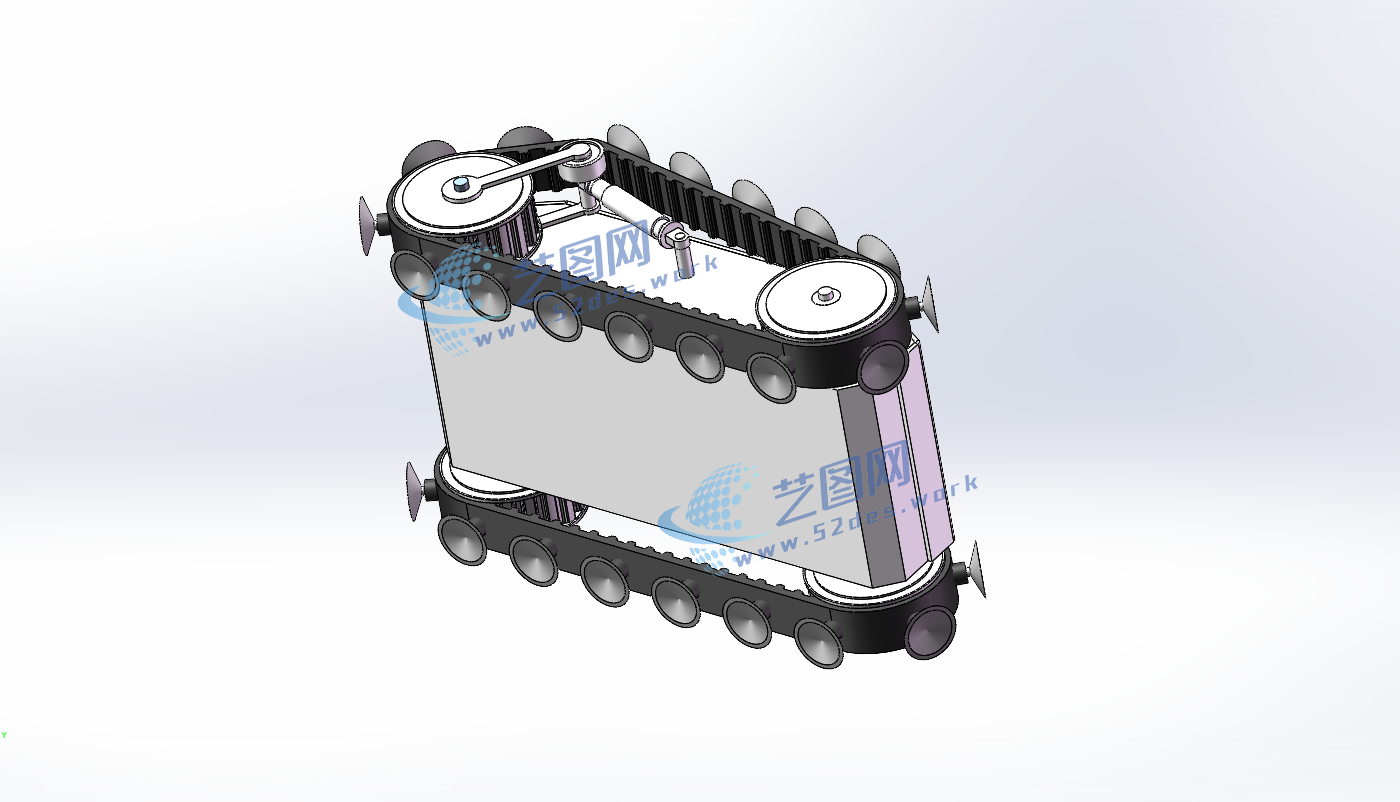 吸盘履带机器人底盘solidworks16版本三维装配模型
吸盘履带机器人底盘solidworks16版本三维装配模型  吸盘履带机器人底盘solidworks16版本三维装配模型
吸盘履带机器人底盘solidworks16版本三维装配模型 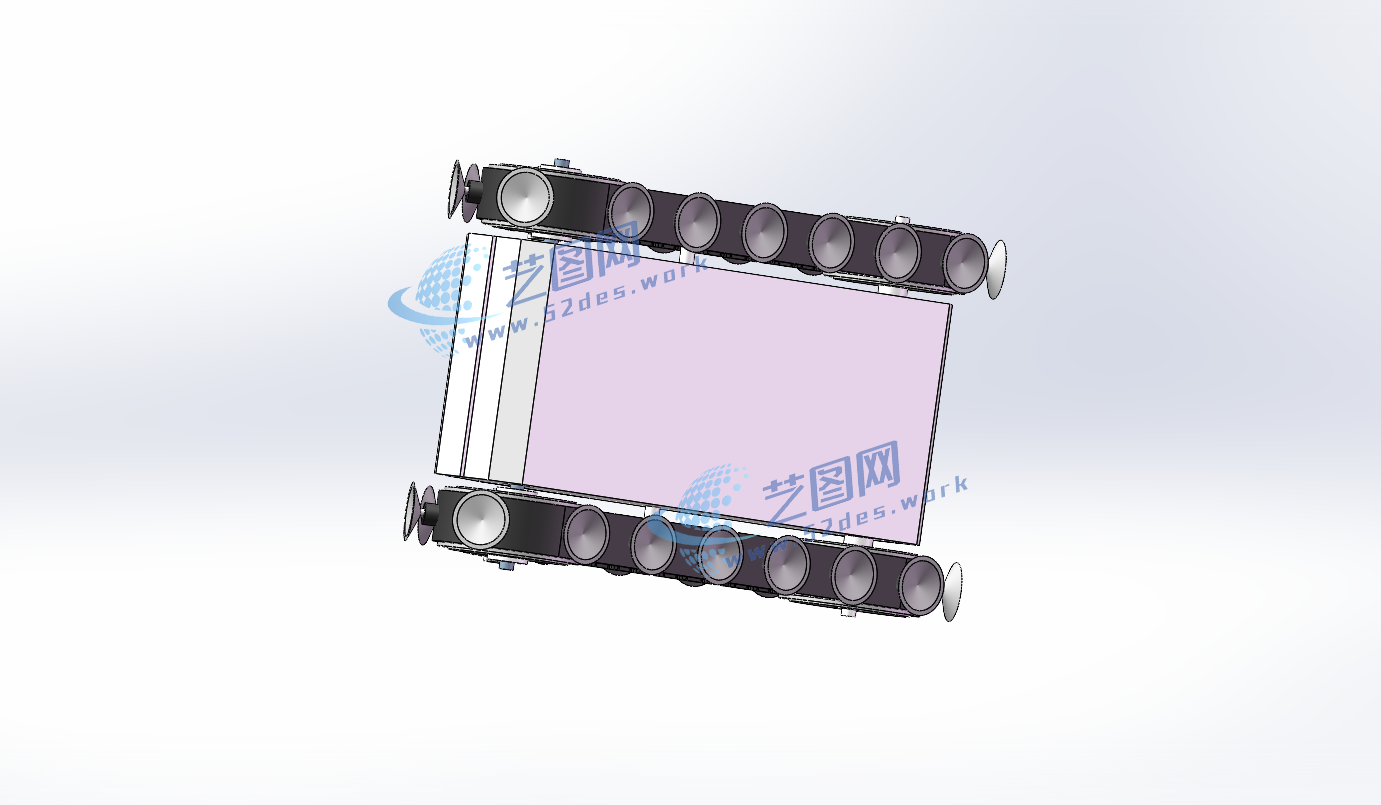 吸盘履带机器人底盘solidworks16版本三维装配模型
吸盘履带机器人底盘solidworks16版本三维装配模型 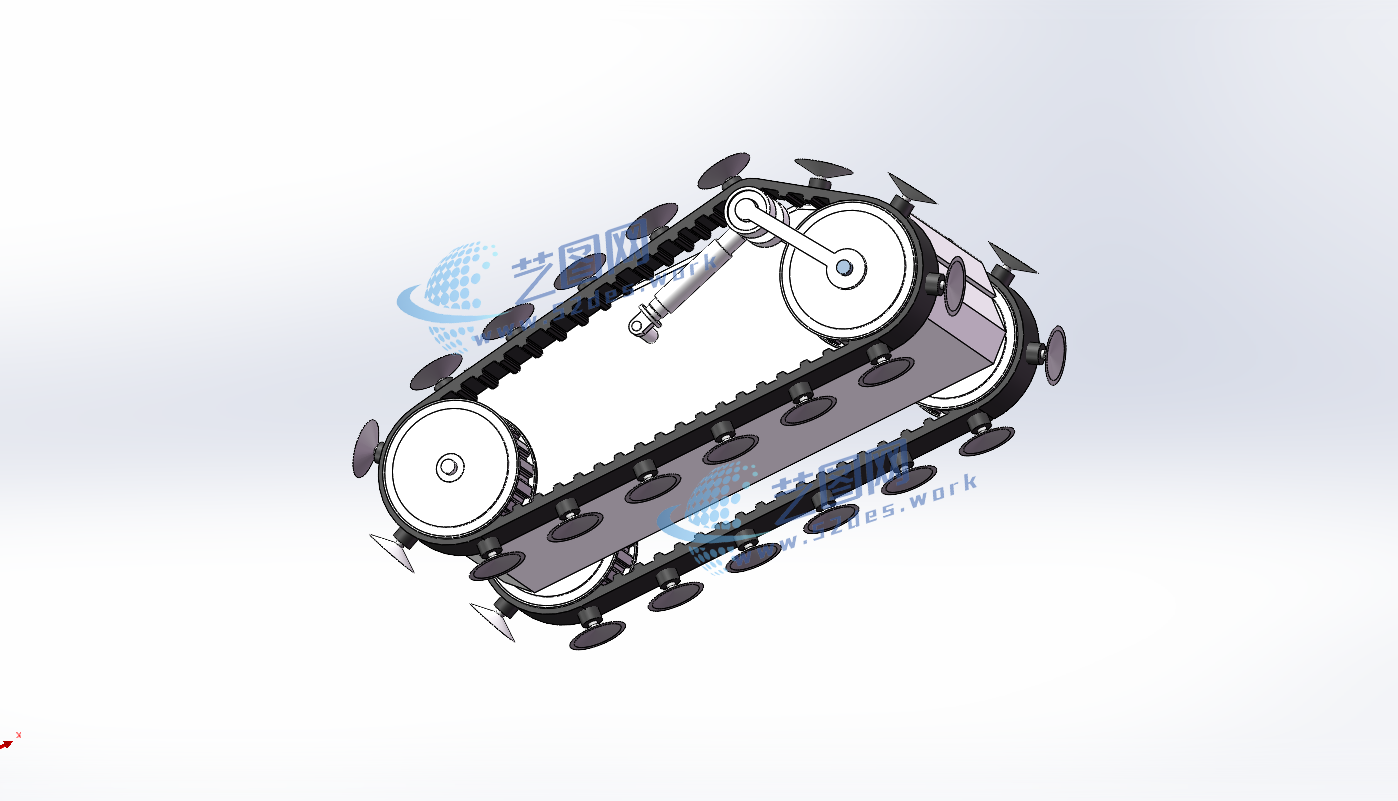
吸盘履带机器人底盘设计旨在结合吸盘技术和履带底盘,实现对不同表面的牢固吸附和稳定行驶。采用高强度材料和先进的吸盘系统,确保机器人能够在垂直、倾斜或不规则表面上牢固附着。履带底盘提供卓越的越障性能,使机器人能够灵活穿越复杂环境。智能导航和遥控系统允许远程操控和监控。这一设计在建筑、清洁、检测等领域广泛应用,为机器人在各类任务中提供了强大的底盘支持。

