
 仿生蝾螈solidworks16版本模型源文件
仿生蝾螈solidworks16版本模型源文件 仿生蝾螈solidworks16版本、三维模型零件预览图
仿生蝾螈solidworks16版本、三维模型零件预览图 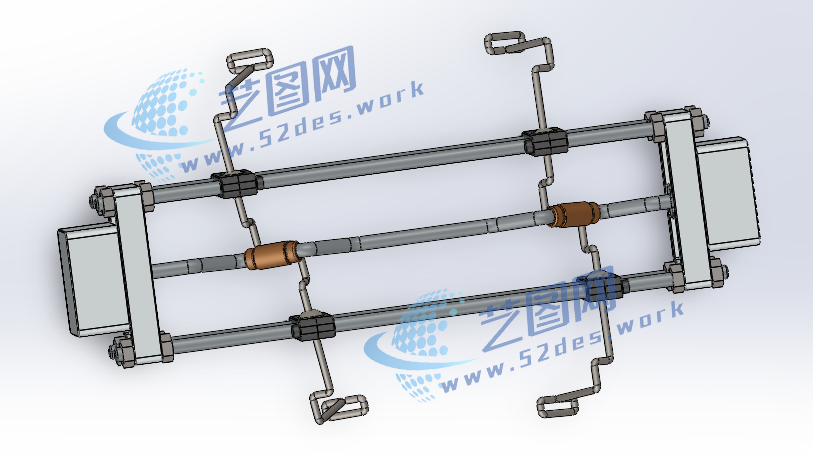 仿生蝾螈solidworks16版本三维装配模型
仿生蝾螈solidworks16版本三维装配模型 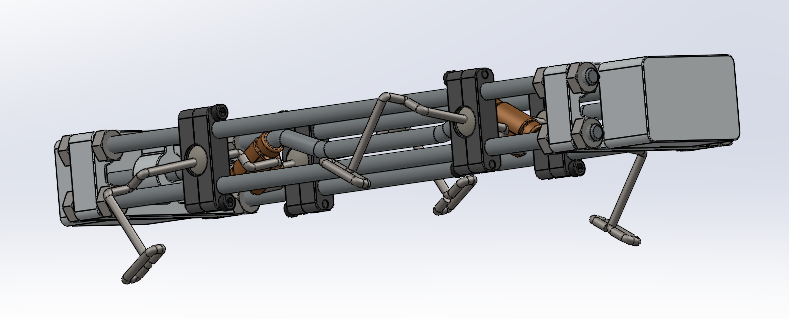 仿生蝾螈solidworks16版本三维装配模型
仿生蝾螈solidworks16版本三维装配模型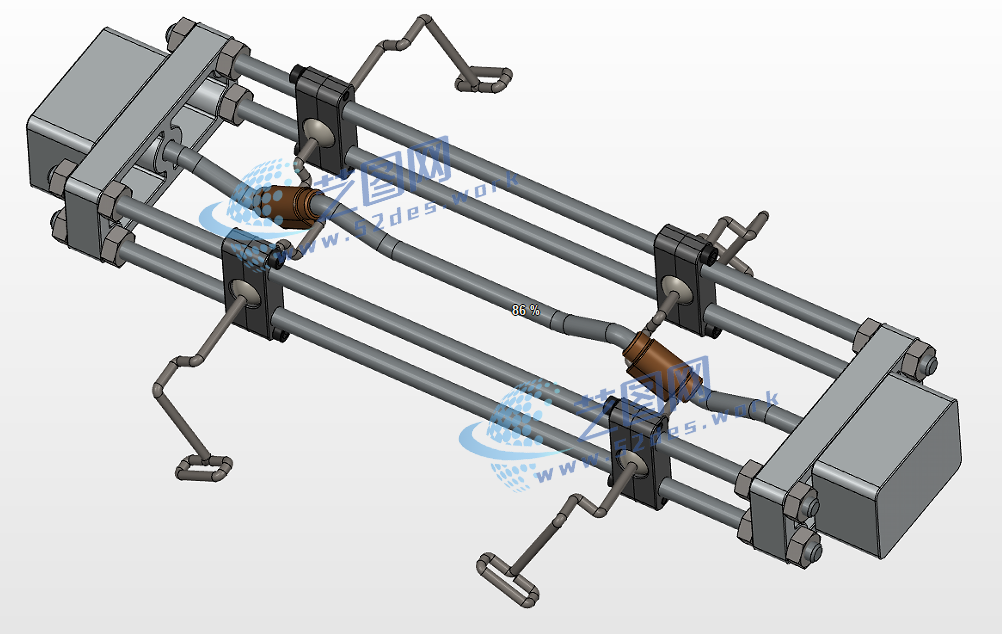 仿生蝾螈solidworks16版本三维装配模型
仿生蝾螈solidworks16版本三维装配模型 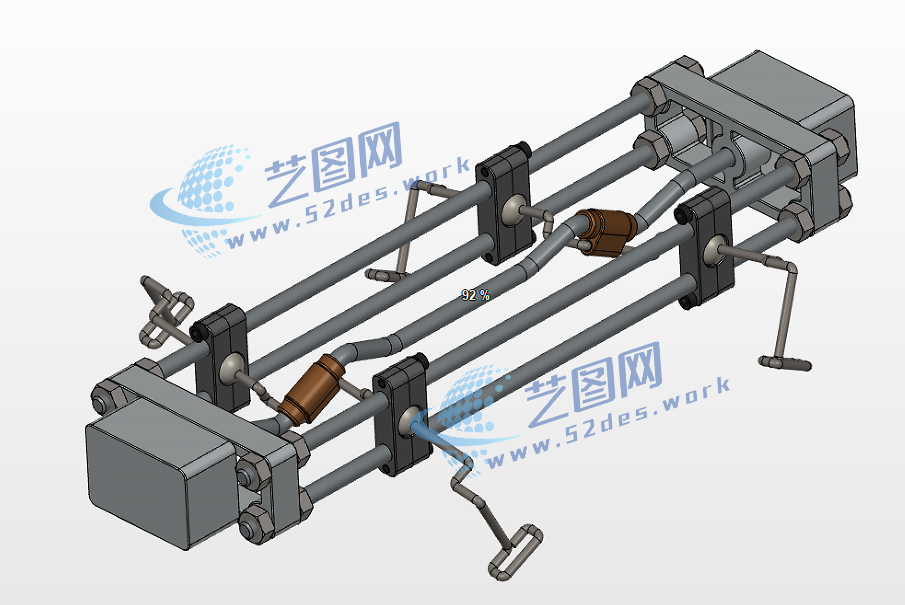
仿生蝾螈设计旨在模拟蝾螈的生物学特征,以实现在机器人和自主探测器中的高效运动和适应性。可能采用仿生学的原理,机器蝾螈可能具有柔软的身体和灵活的四肢,以适应不同地形和环境。其运动系统可能结合了先进的机械和电子技术,实现高度的机动性和导航能力。仿生蝾螈的设计旨在应用于各种领域,包括搜救任务、灾害应对和科学研究,以提高机器在复杂环境中的表现和任务执行能力。

