
 仿生六足机器人solidworks20版本模型源文件
仿生六足机器人solidworks20版本模型源文件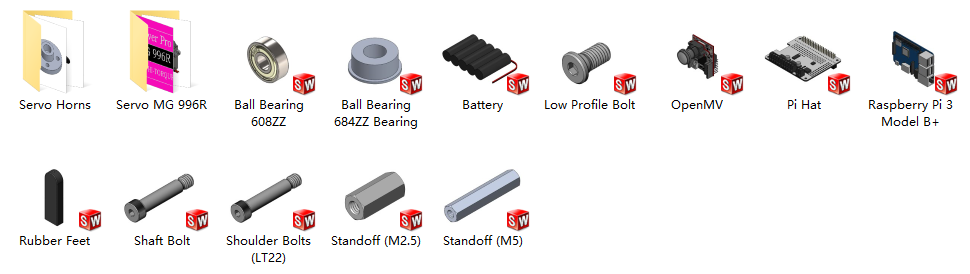
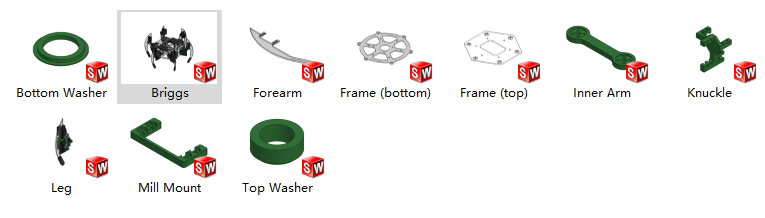 仿生六足机器人solidworks20版本、三维模型零件预览图
仿生六足机器人solidworks20版本、三维模型零件预览图 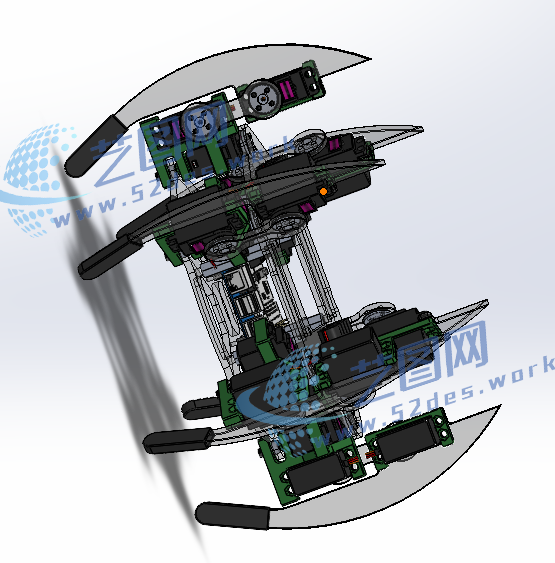 仿生六足机器人solidworks20版本三维装配模型
仿生六足机器人solidworks20版本三维装配模型 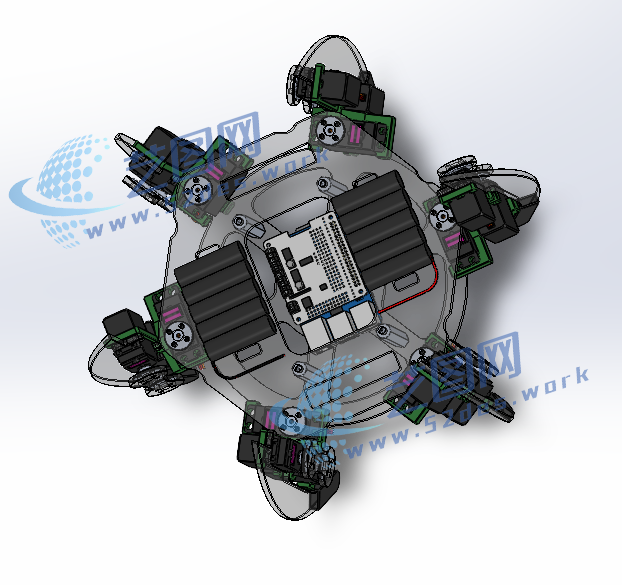 仿生六足机器人solidworks20版本三维装配模型
仿生六足机器人solidworks20版本三维装配模型 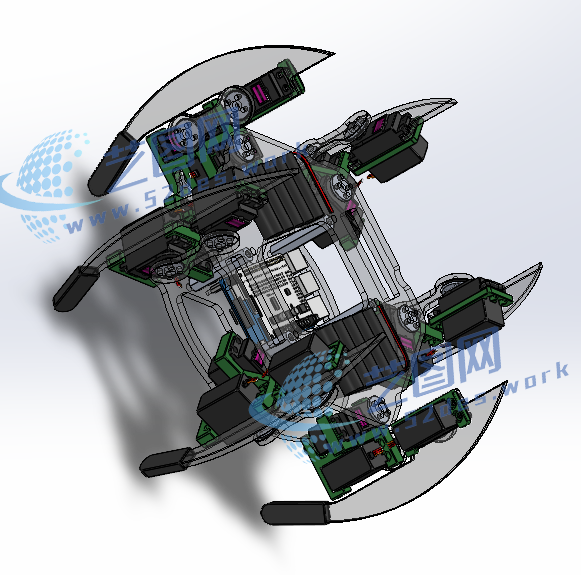 仿生六足机器人solidworks20版本三维装配模型
仿生六足机器人solidworks20版本三维装配模型 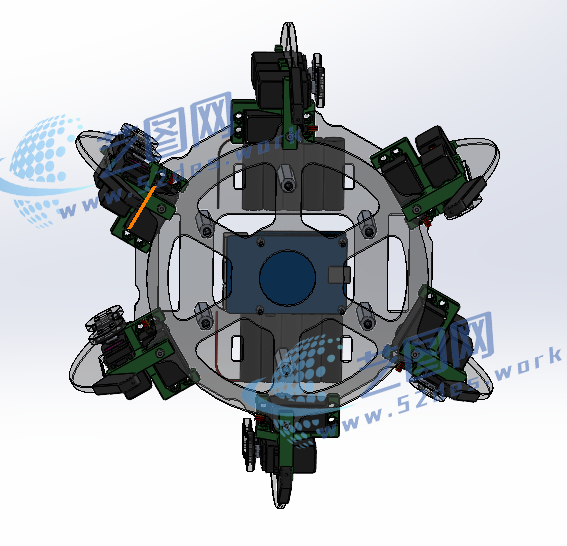 仿生六足机器人solidworks20版本三维装配模型
仿生六足机器人solidworks20版本三维装配模型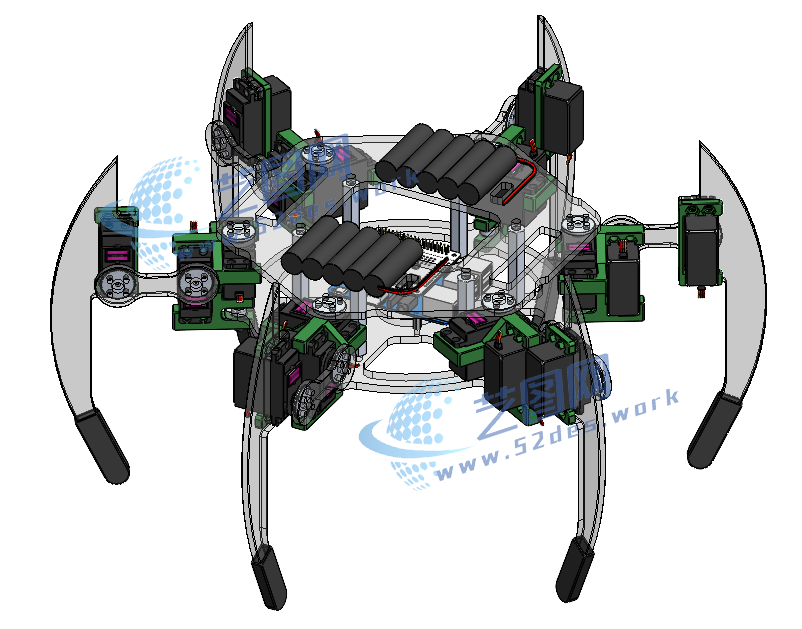
仿生六足机器人设计借鉴了昆虫的生物结构和运动原理,以实现高度的机动性和适应性。机器人可能采用六条仿生腿部,每条腿都具备独立的关节和传感器,以适应各种地形和环境。其仿生学设计考虑到昆虫的高效行走和适应性,旨在在复杂的领域中执行任务,如搜寻救援、勘察探测或危险环境的探索。这种设计追求通过生物学灵感实现机器人在各种应用中的稳健和灵活性。

